Liên hệ quảng cáo
Phương pháp định tuyến cho robot tự hành trong địa hình không bằng phẳng
Ứng dụng
16/12/2019 12:59
Chia sẻ



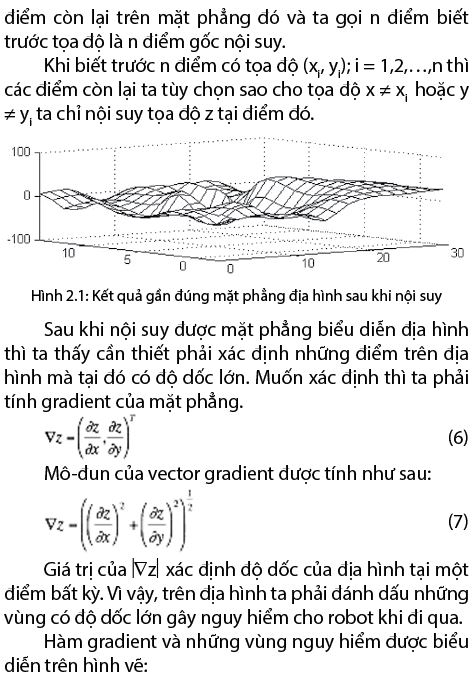
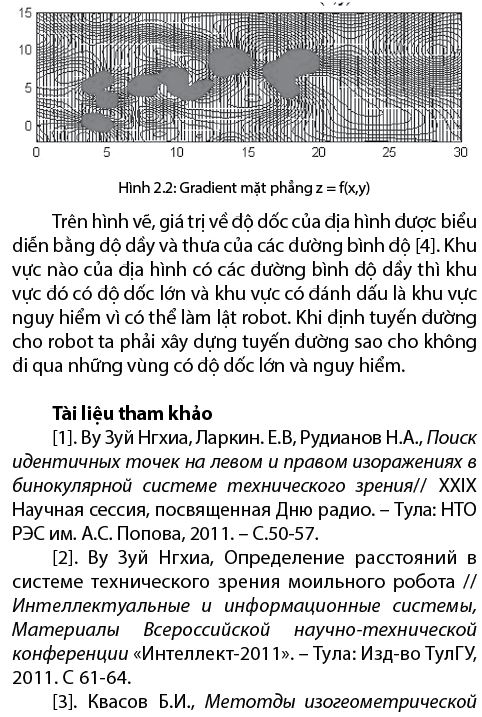
Nghiên cứu phương pháp nội suy mặt phẳng địa hình từ một tập hợp điểm theo phương pháp spline.
|
Th.S Vũ Duy Nghĩa Trường Đại học Giao thông vận tải |
 |
 |
 |
 |
 |
 |
 |
Tag:
Chia sẻ




Bình luận
Thông báo
Bạn đã gửi thành công.