|
ThS. Nguyễn Thanh Tùng PGS. TS. Võ Văn Hường Trường Đại học Bách khoa Hà Nội PGS. TS. Nguyễn Phú Hùng Bộ Khoa học và Công nghệ Người phản biện: TS. Cao Hùng Phi PGS. TS. Lưu Văn Tuấn |
TÓM TẮT: Đoàn xe sơmi-rơmoóc thường mất ổn định và gây TNGT khi phanh trên đường vòng ướt. Bài báo trình bày kết quả nghiên cứu ảnh hưởng của vận tốc bắt đầu phanh đến hiệu quả phanh đoàn xe sơmi-rơmoóc trên đường vòng ướt. Nhóm tác giả sử dụng phương pháp tách cấu trúc và phương trình Newton-Euler để thiết lập hệ phương trình động lực học phanh đoàn xe sơmi-rơmoóc. Sử dụng phần mềm Matlab-simulink để khảo sát phanh đoàn xe sơmi-rơmoóc trên đường vòng ướt có hệ số bám φxmax = 0,6. Kết quả thu được cho thấy, khi đoàn xe sơmi-rơmoóc chạy trên đường vòng ướt có hệ số bám φxmax=0,6 ở vận tốc bắt đầu phanh V0 = 40km/h thì đoàn xe làm việc ổn định và an toàn. Ở vận tốc bắt đầu phanh V0 = 60km/h thì đoàn xe bị gập thân và chuyển động không ổn định.
TỪ KHÓA: Đầu kéo, sơmi-rơmoóc, hiệu quả phanh, vận tốc phanh, đường ướt.
ABSTRACT: The tractorsemi-trailer are often unstable and cause traffic accidents at the moment braking on the round wet road.This arcticle presents the research results about the impact of braking velocityon braking efficiency of tractor semi-trailer on the round wet road. The authors are established dynamic equations of tractor semi-trailer by structural separation method and Newton-Euler equations. We are studied efficiency of tractor semi-trailer on the round wet roadby Matlab-simulink software.Results show that, when the tractor semi-trailer is brakedon the round wet road with grip coefficient φxmax=0.6atbraking velocity V0 ≤ 40km/h, thetractor semi-trailer is very stable and the body of tractor semi-trailer is folded up at braking velocity V0=60km/h.
Keywords: Tractor, semi-trailer, braking efficiency, braking velocity, round wet road.
1. ĐẶT VẤN ĐỀ
Khi đoàn xe sơmi-rơmoóc chạy trong đường vòng ướt thì lái xe có thể phanh ở vận tốc nào cho phù hợp và an toàn là một trong những thông số cần quan tâm, vì thế bài báo khảo sát đoàn xe sơmi-rơmoóc chạy trong đường vòng ướt với những vận tốc khác nhau, trong điều kiện giả định như sau. Quay vô lăng qua trái cho bánh xe dẫn hướng quay một góc δ = 20, rồi giữ cho đoàn xe sơmi-rơmoóc chạy ổn định trong đường vòng ướt có hệ số bám φmax = 0,6 khoảng 3s, sau đó phanh với mô-men bằng 50% mô-men phanh định mức. Khảo sát ở 3 vận tốc bắt đầu phanh là V0 = [20, 40, 60] km/h.
2. MÔ HÌNH KHẢO SÁT
Để nghiên cứu hiệu quả phanh đoàn xe sơmi-rơmoóc 6 cầu, tác giả sử dụng mô hình không gian như Hình 2.1.
Dựa vào phương pháp tách cấu trúc và hệ phương trình Newton-Euler, ta viết được hệ phương trình động lực học đoàn xe sơmi-rơmoóc trong mặt phẳng đường như sau:
- Phương trình chuyển động theo phương dọc x của xe đầu kéo:
 |
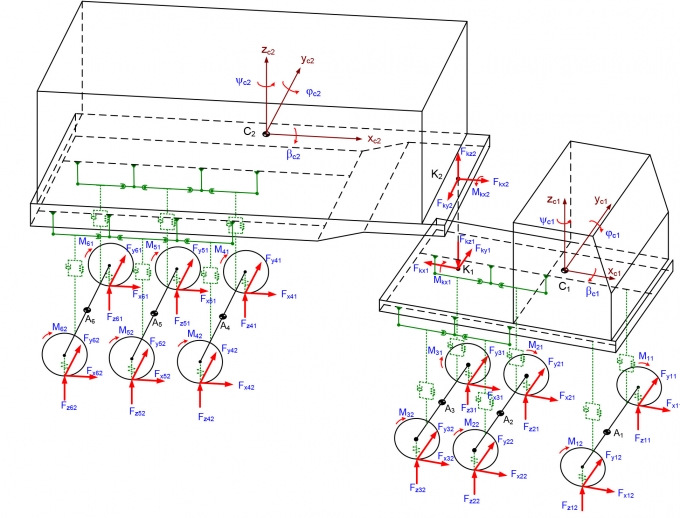 |
| Hình 2.1: Mô hình động lực học đoàn xe sơmi-rơmoóc |
- Phương trình chuyển động theo phương ngang y của xe đầu kéo:
 |
- Phương trình chuyển động quay quanh trục z của thân xe đầu kéo:
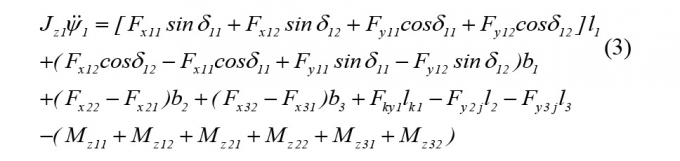 |
-Phương trình chuyển động theo phương dọc x của sơmi-rơmoóc:
 |
- Phương trình chuyển động theo phương ngang y của sơmi-rơmoóc:
- Phương trình chuyển động quay quanh trục z của thân sơmi-rơmoóc:
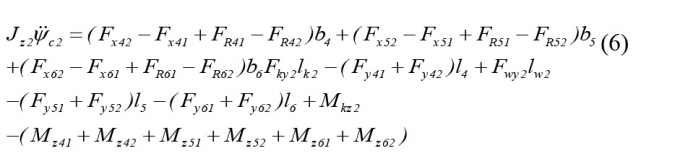 |
3. KẾT QUẢ KHẢO SÁT
 |
|
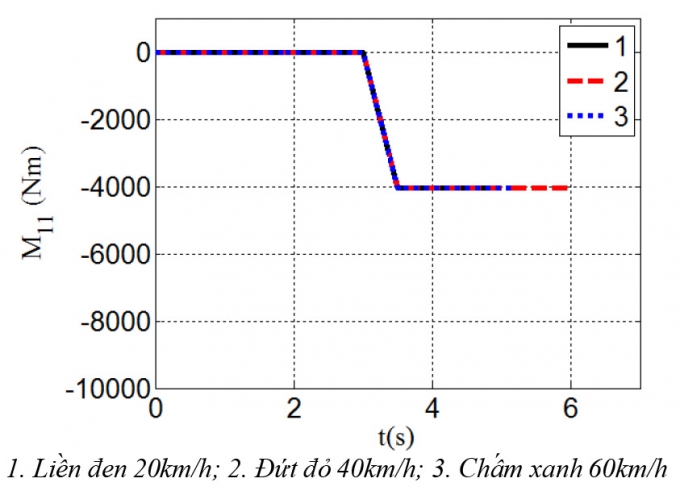
Hình 3.1: Mô-men bánh xe cầu 1 |
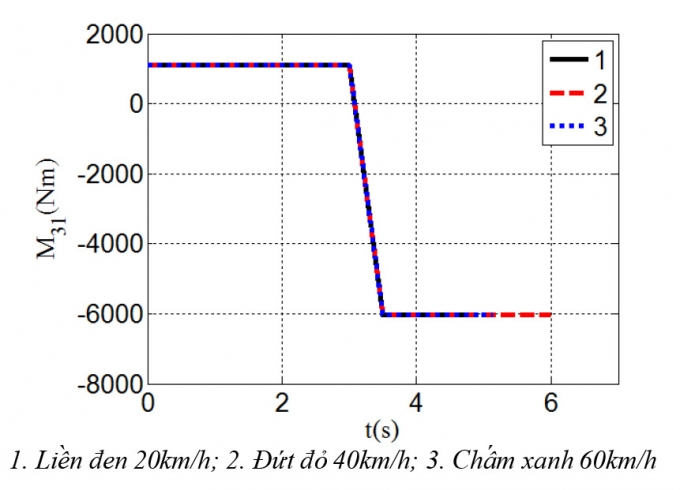 |
| Hình 3.2: Mô-men bánh xe cầu 3 |
Hình 3.1, 3.2là đồ thị mô-men tăng tốc và mô-men phanh của cầu 1 và cầu 3 tương ứng với cường độ 50% mô-men phanh định mức.
 |
| Hình 3.3: Hệ số trượt bánh xe cầu 1 bên trái |
 |
| Hình 3.4: Hệ số trượt bánh xe cầu 1 bên phải |
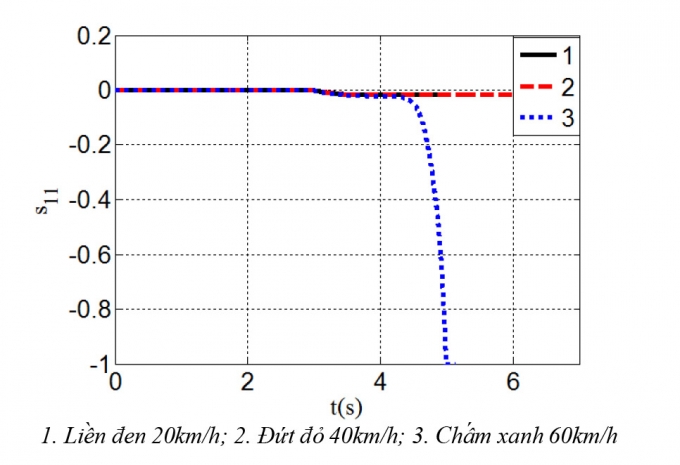
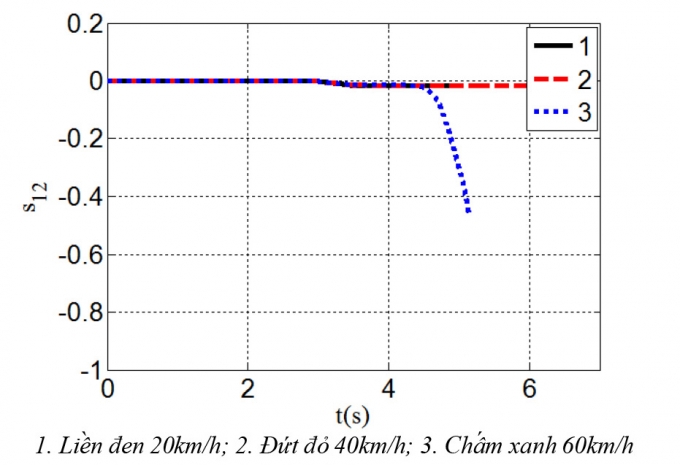
Từ Hình 3.3, 3.4 ta thấy, khi đoàn xe sơmi-rơmoóc chạy trên đường vòng ướt có δ = 20 ở vận tốc 20 - 40km/h, rồi phanh với cường độ bằng 50% mô-men phanh định mức thì hệ số trượt các bánh xe cầu 1 có giá trị rất nhỏ. Còn khi chạy ở vận tốc 60km/h thì hệ số trượt bánh xe cầu 1 bên phải khoảng 46%; hệ số trượt bánh xe cầu 1 bên trái đạt 100%, bánh xe bị bó cứng và trượt hoàn toàn, dẫn đến hiện tượng quay vòng thừa.
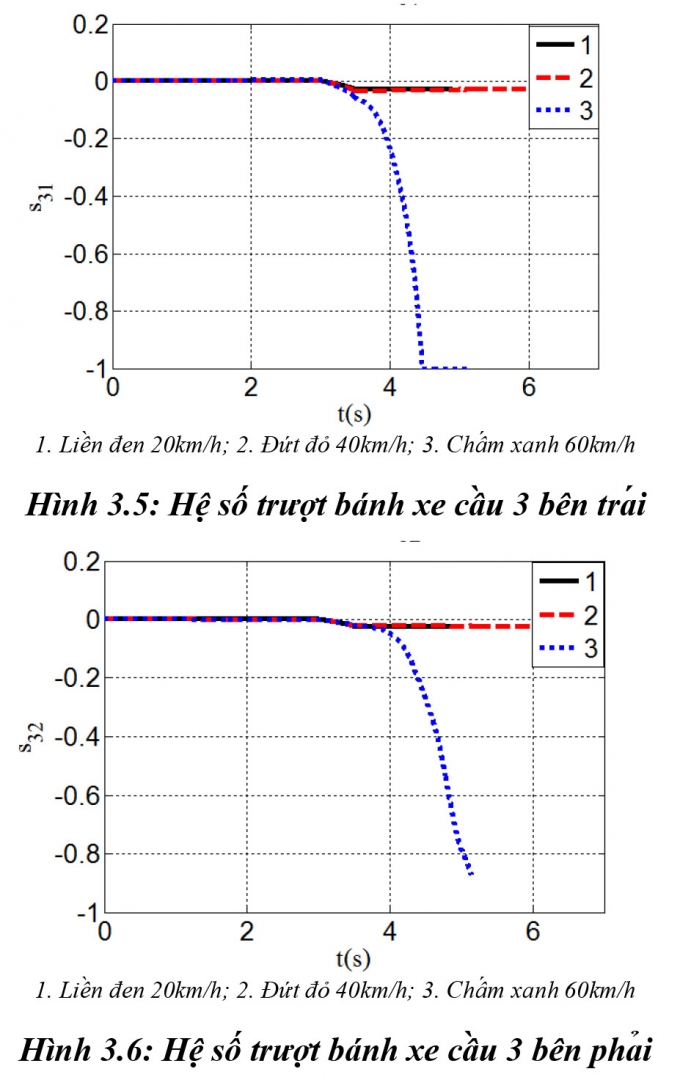 |
Tương tự, cho bánh xe cầu 3 (Hình 3.5, 3.6), khi đoàn xe sơmi-rơmoóc chạy ở vận tốc (20, 40)km/h thì hệ số trượt các bánh xe rất nhỏ. Còn khi chạy ở vận tốc 60km/h thì hệ số trượt bánh xe cầu 3 bên phải khoảng 88%, bánh xe bị trượt mạnh; hệ số trượt bánh xe cầu 3 bên trái đạt 100%, bánh xe bị bó cứng và trượt hoàn toàn, dẫn đến hiện tượng gập thân xe.
 |
| Hình 3.7: Hệ số trượt bánh xe cầu 6 bên trái |
 |
| Hình 3.8: Hệ số trượt bánh xe cầu 6 bên phải |
Đối với bánh xe cầu 6 bên trái Hình 3.7, khi đoàn xe sơmi-rơmoóc chạy ở vận tốc (20, 40)km/h thì hệ số trượt các bánh xe rất nhỏ. Còn khi chạy ở vận tốc 60km/h thì hệ số trượt đạt 100%, bánh xe bị bó cứng và trượt hoàn toàn, sơmi-rơmoóc có khuynh hướng bị vẫy đuôi về bên trái, lúc này sơmi-rơmoóc đẩy đuôi xe đầu kéo qua phải, làm đầu xe quay qua trái dẫn đến hiện tượng quay vòng thừa.
Đối với bánh xe cầu 6 bên phải Hình 3.8, ta thấy trong cả 3 trường hợp thì hệ số trượt các bánh xe rất nhỏ, dưới 5%, bánh xe làm việc ổn định trong vùng tuyến tính.
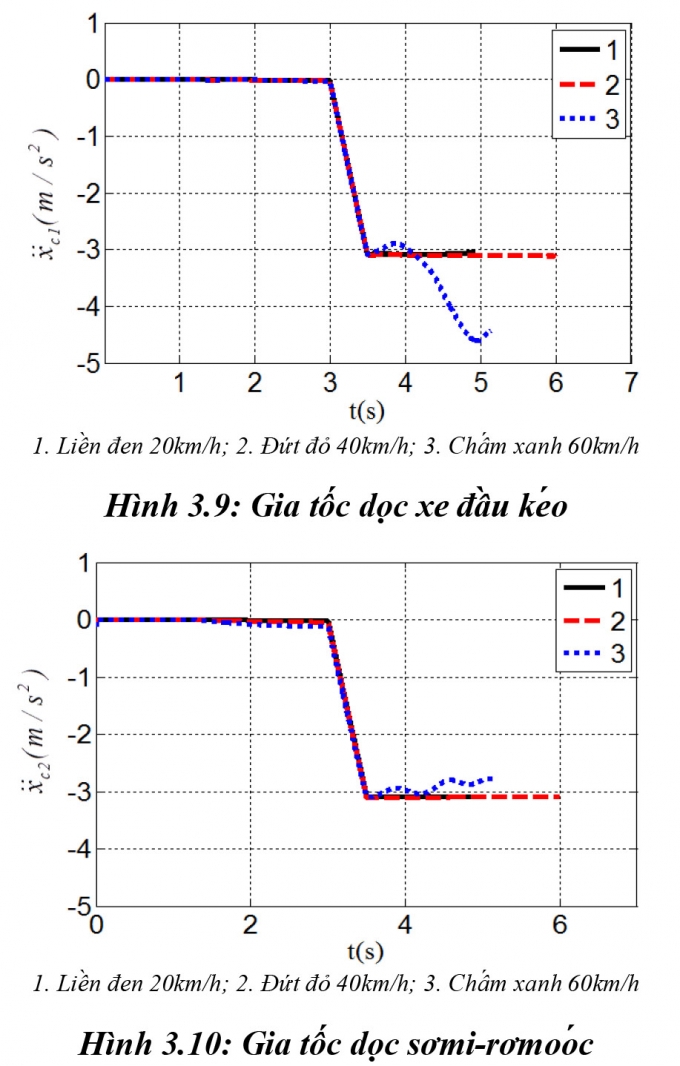 |
Hình 3.9, 3.10 biểu diễn gia tốc dọc của xe đầu kéo và sơmi-rơmooóc. Ta thấy, khi đoàn xe sơmi-rơmoóc chạy ở vận tốc 20, 40km/h thì gia tốc dọc của xe đầu kéo và sơmi-rơmoóc gần bằng nhau và có giá trị khoảng 3,1m/s2. Lúc đoàn xe chạy ở vận tốc 60km/h thì gia tốc dọc của sơmi-rơmoóc nhỏ hơn gia tốc dọc của xe đầu kéo là do hiện tượng đẩy của sơmi-rơmoóc và quay vòng thừa của xe đầu kéo.
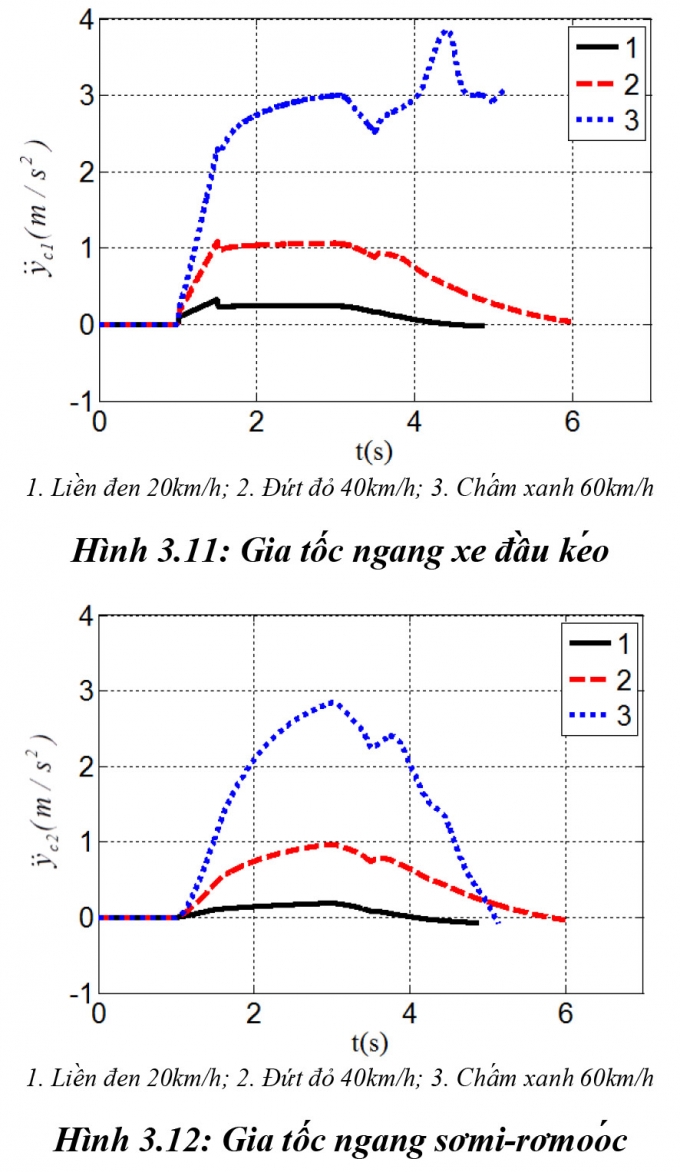 |
Khi đoàn xe sơmi-rơmoóc chạy trong đường vòng và chưa phanh (t = 1 ÷ 3s) do lực quán tính ly tâm nên gia tốc ngang của xe đầu kéo và sơmi-rơmoóc tăng khoảng 3m/s2. Khi phanh (t = 3 ÷ 6s) do tốc độ đoàn xe giảm, nên lực quán tính ly tâm giảm, làm gia tốc ngang của đoàn xe sơmi-rơmoóc giảm về giá trị 0, riêng ở tốc độ 60km/h thì gia tốc ngang của xe đầu kéo tăng khi phanh là do các bánh xe dẫn hướng bị trượt, dẫn đến quay vòng thừa (Hình3.11, 3.12).
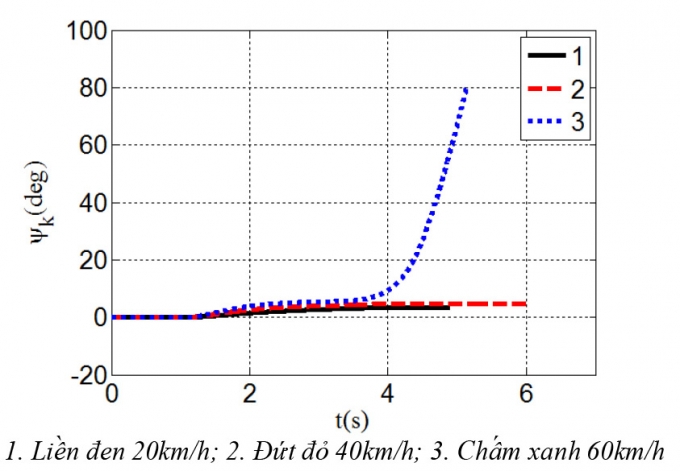 |
| Hình 3.13: Góc lệch thân xe |
Hình 3.13 biểu diễn góc lệch giữa thân xe đầu kéo và thân sơmi-rơmoóc. Ta thấy sau khi phanh đoàn xe sơmi-rơmoóc ở vận tốc 60km/h khoảng 2,5s thì góc lệch thân xe tăng lên nhanh chóng và đạt gần 80o, do quay vòng thừa của xe đầu kéo và vẫy đuôi của sơmi-rơmoóc.
4. KẾT QUẢ
Khi phanh đoàn xe với cường độ 50%, mô-men phanh định mức trong đường vòng ướt, có hệ số bám thấp φxmax = 0,6 ở vận tốc V0 = 20km/h thì gia tốc dọc xe đầu kéo và sơmi-rơmoóc khoảng 3,1m/s2, gia tốc ngang xe đầu kéo và sơmi-rơmoóc khoảng 0,2m/s2, đoàn xe làm việc ổn định và an toàn; phanh ở vận tốc V0 = 40km/h thì gia tốc dọc xe đầu kéo và sơmi-rơmoóc khoảng 3,m/s2, gia tốc ngang xe đầu kéo và sơmi-rơmoóc khoảng 1m/s2, đoàn xe làm việc ổn định và an toàn. Ở tốc độ V0 = 60km/h thì các bánh xe bên trái bị trượt hoàn toàn 100%, gia tốc dọc xe đầu kéo lớn hơn gia tốc dọc sơmi-rơmoóc, gia tốc ngang xe đầu kéo đạt 3m/s2 và lớn hơn gia tốc ngang sơmi-rơmoóc khoảng 0,2m/s2, góc lệch giữa thân xe đầu kéo và sơmi-rơmoóc ψK = 80o đoàn xe bị gập thân và chuyển động không ổn định.
Tài liệu tham khảo
[1]. Võ Văn Hường và các tác giả (2014), Động lực họcôtô, NXB. Giáo dục Việt Nam.
[2]. J.R. Elli (1970), A model of the semi-trailer vehicle including roll models, Cranfield Intitute of Technology, Bedford, United Kingdon.
[3]. International conference (2008), International conference on heavy vehicles, HV Paris.
[4]. Reza N. Jazar (2005), Vehicle Dynamics, Springer Newyork.
[5]. Werner Schielen (2007), Dynamical Analysis of Vehicle Systems, CISM Courses and Lectures, vol. 497, Springer Wien NewYork.
[6]. Dieter Ammon (1997), Modellbilung und Systementwicklung in der Fahrzeug-dynamik, B.G Teubner Stuttgart.
Tag:
Bình luận
Thông báo
Bạn đã gửi thành công.