Liên hệ quảng cáo
Điều khiển động cơ đồng bộ kích thích nam châm vĩnh cửu trong điều kiện thời gian thực
Bài báo đề xuất hệ thống thực nghiệm hệ truyền động điện.
|
TS. Phạm Tâm Thành Trường Đại học Hàng hải Việt Nam Người phản biện: TS. Đinh Anh Tuấn TS. Đào Minh Quân |
Tóm tắt: Bài báo đề xuất hệ thống thực nghiệm hệ truyền động điện. Cấu trúc sử dụng vi xử lý tín hiệu số DSP họ C2000 của Texas Instruments. Với hệ thống thực nghiệm này cho phép can thiệp vào các phần của bộ biến tần, triển khai các bài thí nghiệm các cấu trúc điều khiển động cơ đồng bộ kích thích vĩnh cửu và cho phép phát triển các cấu trúc điều khiển hiện đại cho động cơ đồng bộ kích thích vĩnh cửu.
Từ khóa: DSP, PMSM, Digital Control, electrical drive.
Abstract: The paper proposed experiment systems of electric drive. This structure uses digital signal processor family C2000 of Texas Instruments. This system permits users can log in firmware of inverter and implement experiment of structure control of Permanet Magnet Synchronous Motor (PMSM). Advantage Control strutures can be developed for PMSM.
Keywords: DSP, PMSM, Digital Control, electrical drive.
1. Đặt vấn đề
Điều khiển truyền động điện động cơ điện xoay chiều ba pha là lĩnh vực được nghiên cứu từ nhiều thập kỷ, từ các lý thuyết điều khiển kinh điển cho đến các kỹ thuật hiện đại [3][4][6]. Ngày nay, điều khiển động cơ điện xoay chiều đã đạt được những tiến bộ vượt bậc, chủ yếu nhờ sự phát triển của công nghệ bán dẫn, công nghệ vi xử lý [1][10] và kỹ thuật điều khiển. Các bộ biến tần được thiết kế ngày càng hoàn thiện, đáp ứng được những đòi hỏi khắt khe trong điều chỉnh tự động, dải công suất cũng như tốc độ cho phép điều chỉnh ngày càng mở rộng, nhiều tính năng mới được thêm vào biến tần để đáp ứng các nhu cầu điều khiển đa dạng trong thực tế [6][9][10][11][12][13][14][15][16]. Cấu trúc điều khiển động cơ xoay chiều ba pha nói chung và động cơ đồng bộ kích thích nam châm vĩnh cửu nói riêng được sử dụng trong robot, quá trình sản xuất, ô tô điện, cần trục, cầu trục ở các cảng biển…
Điều khiển véc-tơ là một phương pháp điều khiển động cơ điện xoay chiều ba pha hiện đại, với ưu điểm gắn liền một cách rõ ràng các phương pháp mô tả toán học chính xác các mối quan hệ vật lý của động cơ với các công nghệ điều khiển mới, nó có khả năng vượt trội về áp đặt dòng điện, mô-men [6].
Ở Việt Nam và quốc gia khác, đề tài nghiên cứu điều khiển động cơ xoay chiều ba pha đã được nhiều nhà khoa học quan tâm. Các cấu trúc điều khiển cho động cơ xoay chiều ba pha rất đa dạng, phong phú. Cấu trúc điều khiển động cơ xoay chiều ba pha có thể là tuyến tính, phi tuyến.
Mô hình biến tần-động cơ đã có sẵn trong phòng thí nghiệm, tuy nhiên, để sinh viên nắm bắt được cấu trúc điều khiển động cơ xoay chiều ba pha, can thiệp vào các bộ điều chỉnh dòng, bộ điều chỉnh tốc độ, phương pháp điều chế thì mô hình này không thực hiện được.
Do đó, cần thiết phải xây dựng hệ thống thí nghiệm truyền động điện động cơ xoay chiều ba pha cho phép can thiệp được cấu trúc điều khiển, giúp sinh viên nắm bắt được cấu trúc điều khiển hiện đại nhất của các loại biến tần trên thị trường, cũng như có thể nghiên cứu phát triển, triển khai các cấu trúc điều khiển. Đó cũng chính là nội dung đề xuất trong bài báo.
2. Cấu trúc hệ điều khiển tựa theo từ thông rô-to (T4R) động cơ đồng bộ kích thích vĩnh cửu
Cấu trúc Hình 2.1 được cài đặt thành công trong các công trình [6], trong đó chương trình điều khiển được thực hiện bởi DSP TMS320C20/C25 bằng ngôn ngữ assembly. Bài báo đề xuất thực hiện thuật toán điều khiển sử dụng DSP C2000 bằng ngôn ngữ bậc cao. Cấu trúc gồm các khâu: Khối nghịch lưu nguồn áp (1) (VSI - Voltage Source Inverter), khâu điều chế véc-tơ không gian (2) (SVM - Space Vector Modulation); khâu (3) và (6) là các khâu chuyển trục tọa độ; khâu (4): Khâu điều chỉnh dòng hai chiều RI; Khâu (5): Khâu chuyển trục tọa độ; khâu (7): Khâu suy giảm từ thông; khâu (8): Khâu điều chỉnh tốc độ quay (Rω); khâu tích phân (9): Tính từ đại lượng đo ù. Hai thành phần dòng điện isd và isq trong thực tế luôn có tương tác qua lại với nhau. Do vậy, trong cấu trúc đã sử dụng một bộ điều khiển dòng hai chiều RI với mong muốn triệt tiêu sự tương tác này.
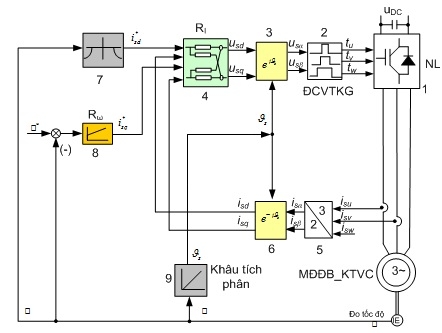 |
| Hình 2.1: Cấu trúc điều khiển động cơ đồng bộ kích thích vĩnh cửu dựa trên nguyên lý tựa theo từ thông rô-to |
3. Hệ thống thí nghiệm truyền động đồng bộ xoay chiều ba pha
3.1. Vi điều khiển C2000
Họ vi điều khiển C2000 là họ vi điều khiển mạnh, có thể thực hiện các thuật toán điều khiển phức tạp với sự kết hợp của các thiết bị ngoại vi để giao tiếp với các thành phần khác nhau của phần cứng điều khiển động cơ DMC (Digital Motor Control) như ADC (Analog Digital Conveter), ePWM (Pulse Width Modulation), QEP (Quadrature Encoder), ECAP (Capture)…, cùng với phần mềm đi kèm của C2000 giúp giảm thời gian phát triển các cấu trúc điều khiển động cơ. Thư viện điều khiển số động cơ DMC cung cấp các khối cấu hình có thể được sử dụng để thực hiện các phương pháp điều khiển mới. Thư viện IQMath cho phép chuyển đổi dễ dàng từ các thuật toán dấu phảy động sang dấu phảy tĩnh, do đó đẩy nhanh được thời gian phát triển. Trong cấu trúc thí nghiệm sử dụng vi xử lý tín hiệu số DSP (Digital Signal Processor) F28035.
3.2. Cấu trúc thực nghiệm
Mô hình thực nghiệm được xây dựng trên cơ sở DSP C2000 của hãng Texas Instruments, mô-đun công suất chuẩn. Hệ truyền động bao gồm một động cơ đồng bộ kích thích vĩnh cửu (là đối tượng điều khiển) nối trục với tải. Với thế mạnh của hệ thống này cho phép chúng ta có thể thực hiện được hầu hết các thuật toán điều khiển truyền động như: Điều khiển véc-tơ, điều khiển sensorless, điều khiển phi tuyến…
Động cơ thực nghiệm là động cơ hãng Estun có các thông số: Công suất định mức: PN= 0,4kW, dòng điện định mức: IN=2,7A, mô-men định mức: mN=1,27Nm, số đôi cực: zp=8, tốc độ định mức: nN= 3000 vòng/phút, điện áp định mức: UN= 220V, điện trở stator: Rs=2,35 W, mô-men quán tính: J=0,000031kgm2 , điện cảm Stator: Ls=0,0065H.
a) - Cấu trúc; b) - Module công suất
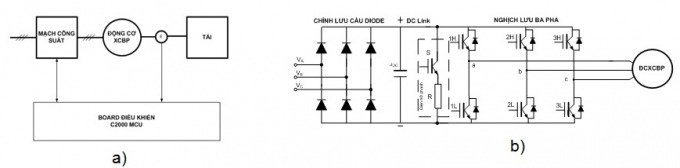 |
| Hình 3.1: Sơ đồ khối cấu trúc của hệ thống thí nghiệm |
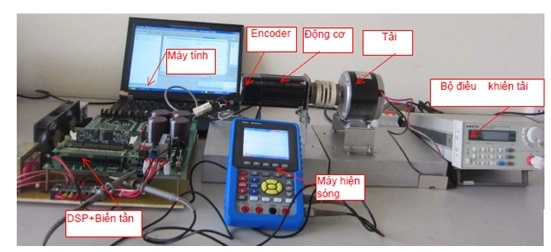 |
| Hình 3.2: Hình ảnh của hệ thống thực nghiệm |
4. Cài đặt các cấu trúc điều khiển
4.1. Cấu trúc điều khiển động cơ đồng bộ kích thích nam châm vĩnh cửu có sử dụng cảm biến tốc độ
Chương trình điều khiển được lập trình dưới dạng các mô-đun (macro) sử dụng phần mềm Code Composer Studio (CCS) của hãng Texas Instruments, thuận lợi cho việc phát triển các cấu trúc điều khiển khác nhau.
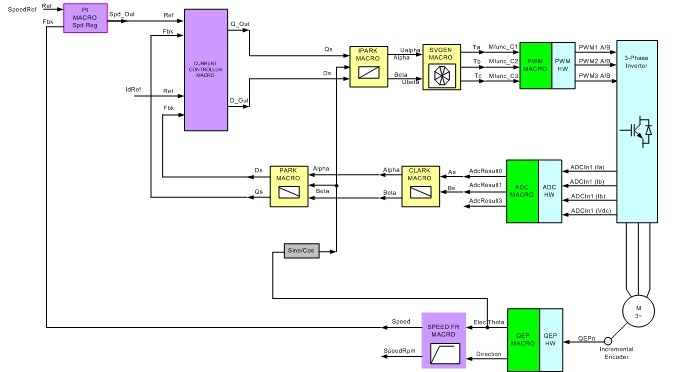 |
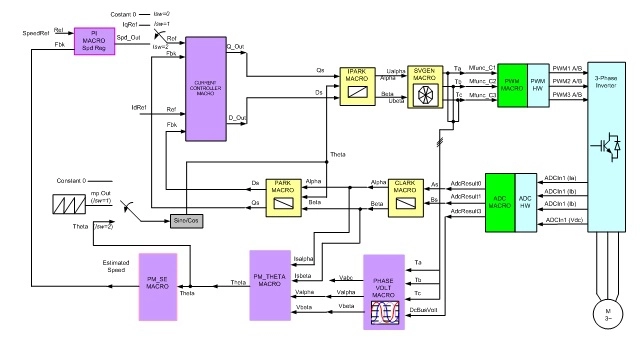
| Hình 4.1: Cấu trúc phần mềm điều khiển động cơ đồng bộ kích thích vĩnh cửu có sử dụng cảm biến tốc độ |
4.2. Cấu trúc điều khiển động cơ đồng bộ kích thích nam châm vĩnh cửu không sử dụng cảm biến tốc độ (điều khiển sensorless)
 |
| Hình 4.2: Cấu trúc phần mềm điều khiển sensorless động cơ đồng bộ kích thích vĩnh cửu |
5. Kết quả thực nghiệm
Một số kết quả bước đầu
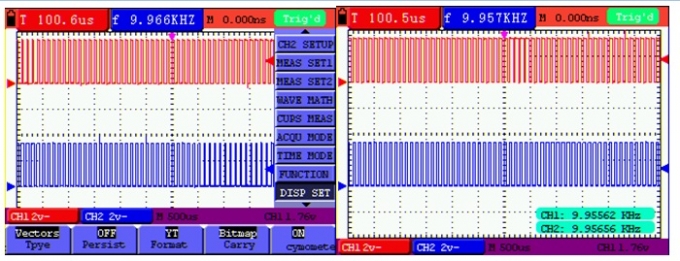 |
| Hình 5.1: Dạng sóng PWM1H, PWM2H và PWM1L-PWM2L |
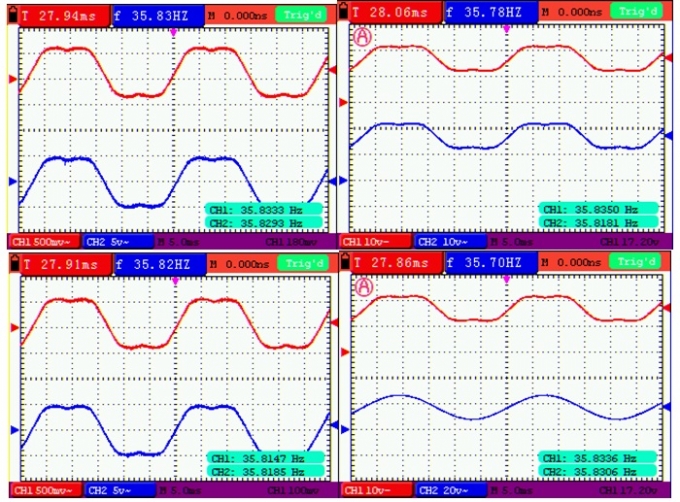 |
| Hình 5.2: Thời gian đóng ngắt các van Ta- Tb, Ta-Tc, Tb-Tc và Ta&Tb-Tc quan sát bởi oscilloscope |
 |
|
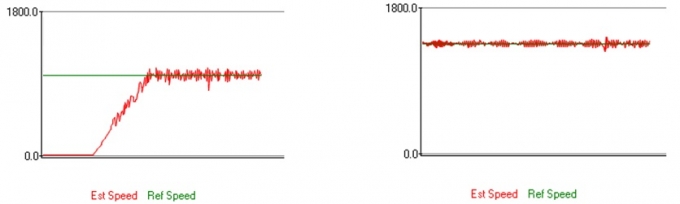
Hình 5.3: Đáp ứng tốc độ thực khi tốc độ đặt 1.050 vòng/phút |
Hình 5.4: Đáp ứng tốc độ khi tốc độ đặt là 1.350 vòng/phút |
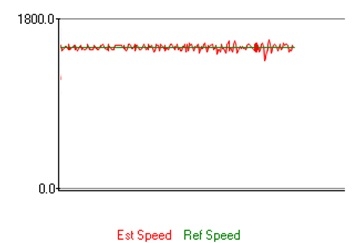 |
| Hình 5.5: Đáp ứng tốc độ khi thực nghiệm khi tốc độ đặt 1.500 vòng/phút |
Tốc độ thực bám rất sát tốc độ đặt, chứng tỏ các bộ điều chỉnh được tổng hợp và chỉnh định chính xác. Phần 4 làm nhiệm vụ cài đặt các cấu trúc điều khiển điển hình cho động cơ đồng bộ kích thích vĩnh cửu. Từ đó, ta đi đến nhận định: Với kết quả đạt được trong phần 4 đã cho thấy mô hình thí nghiệm có khả năng cài đặt, phát triển các cấu trúc điều khiển, có ý nghĩa thực tiễn trong công tác giảng dạy các học phần về điều khiển truyền động điện.
6. Kết luận
Bài báo đã giải quyết được các vấn đề sau: Nghiên cứu cấu trúc điều khiển động cơ xoay chiều ba pha dựa trên nguyên lý tựa theo từ thông rô-to, nghiên cứu về DSP, xây dựng hệ thống thực nghiệm hệ truyền động đồng bộ, cài đặt và tiến hành thử nghiệm một số cấu trúc điều khiển điển hình cho động cơ đồng bộ kích thích vĩnh cửu.
Tài liệu tham khảo
[1]. Nguyễn Bính (2000), Điện tử công suất, NXB. Khoa học và kỹ thuật, Hà Nội.
[2]. Thân Ngọc Hoàn, Nguyễn Tiến Ban (2007), Điều khiển tự động các hệ thống truyền động điện, NXB. Khoa học và Kỹ thuật, Hà Nội.
[3]. Bùi Quốc Khánh, Phạm Quốc Hải, Nguyễn Văn Liễn, Dương Văn Nghi (2004), Điều chỉnh tự động truyền động điện, NXB. Khoa học và Kỹ thuật, Hà Nội.
[4]. Nguyễn Văn Liễn, Nguyễn Mạnh Tiến, Đoàn Quang Vinh (2005), Điều khiển động cơ xoay chiều ba pha cấp từ biến tần bán dẫn, NXB. Khoa học và Kỹ thuật, Hà Nội.
[5]. Nguyễn Doãn Phước (2006), Lý thuyết điều khiển nâng cao, NXB. Khoa học và Kỹ thuật, Hà Nội.
[6]. Nguyễn Phùng Quang, Andreas Dittrich (2004), Truyền động điện thông minh, NXB. Khoa học và Kỹ thuật, Hà Nội.
[7]. Texas Instruments:TMS320F28xx-Digital Signal Processor.
[8]. Phạm Tâm Thành, Nguyễn Phùng Quang (2011), Khảo sát đặc điểm ổn định của mô hình trạng thái gián đoạn của động cơ đồng bộ kích thích vĩnh cửu, CD tuyển tập hội nghị điều khiển và tự động hóa toàn quốc lần thứ nhất, VCCA-2011, tr.318-323, Hà Nội.
[9]. Pham Tam Thanh, N.P. Quang (2013), Quasi-continous Implementation of Structural Nonlinear Controller Based pn Direct-decoupling for Permanent Magnet Synchronous Motor, IEEE International Conference on Control, Automation and Information Sciences (ICCAIS2013), Nha Trang, Vietnam,pp.254-259.
[10]. H.H. Choi, N. T.-T. Vu, and J.-W Jung (January 2011), Digital Implementation of an Adaptive Speed Regulator for a PMSM, IEEE Transactions on Power Electronics, vol 26(1).
[11]. Jianguo Zhou, Youyi Wang (2005), Real-time nonlinear adaptive backstepping speed control for a PM Synchronous Motor, Control Engineering Practice, vol 13, pp. 1259-1269.
[12]. J. Solsona, M.I. Valla, C. Muravchik (2000), Nonlinear control of a permanent magnet synchronous motor with disturbance torque Estimation, IEEE Transactions on Energy Conversion, vol 15 (2), pp. 163-168.
[13]. J. Solsona, M.I. Valla, C. Muravchik (1995), Sensorless nonlinear control of permanent magnet synchronous motors, Proceedings of the IEEE IECON 21st International Conference on Industrial Electronics Control and Instrumentation, vol.2, pp.1006 - 1011.
[14]. Jun Zhang, Zhaojun Meng, Rui Chen, Changzhi Sun and Yuejun An (2011), Decoupling control of PMSM based on exact linearization, International Conference on Electronic and Mechanical Engineering and Information Technology (EMEIT), vol 3, pp. 1458 - 1461.
[15]. K.Alice Mary, A. Patra, N.K De (2007), A generalized approach to the design of the speed control system for inverter-driven permanent magnet synchronous motor, IET-UK International Conference on Information and Communication Technology in Electrical Sciences (ICTES 2007), pp. 441 - 447.
[16]. Pham Tam Thanh, Nguyen D.That (2014), Nonlinear Flatness-Based Controller for Permanent Magnet-Excited Synchronous Motor, The 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC 2014), Sydney, Australia, pp.120-125.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.