Liên hệ quảng cáo
Điều khiển dự báo tối thiểu hóa sai lệch dòng điện cho nghịch lưu 3 pha IGBT
Nghịch lưu 3 pha IGBT được ứng dụng rộng rãi cho các hệ truyền động điện, các thiết bị truyền động sức kéo và nhiều ứng dụng khác nhau trong GTVT.
|
ª ThS. Lê Thị Tuyết Nhung Trường Đại học Giao thông vận tải Người phản biện: TS. Phạm Văn Nguyên PGS. TS. Lê Tòng |
Tóm tắt: Nghịch lưu 3 pha IGBT được ứng dụng rộng rãi cho các hệ truyền động điện, các thiết bị truyền động sức kéo và nhiều ứng dụng khác nhau trong GTVT. Với các tải có biến động lớn về mô-men một yêu cầu quan trọng là điều khiển tối thiểu hóa sai lệch dòng điện. Bài báo đề xuất thuật toán dự báo trước đáp ứng dòng tải, điều khiển chọn vec-tơ điện áp làm tối thiểu hóa sai lệch dòng điện và tối ưu hóa đáp ứng dòng tải. Thuật toán này sử dụng mô hình tải và mô hình bộ nghịch lưu, dự báo đáp ứng dòng tải.
Từ khóa: Điều khiển dự báo dòng điện, nghịch lưu 3 pha IGBT.
Abstract: Three phase inverter using IGBT have a wide range of electric drive. applications, traction equipment, and other applications in transportation field. With eletric drives in which the load torque is variant, it is important to control in order to minimize the load current error as small as possible. The paper propose the control algorithm, in which the load model and the inverter model are used, to predict the load curent behavior and to caculate the load voltage vector to minimize the current error between the predicted and reference load current and moreover to optimize current behavior.
Keywords: Controls forecast current, 3 -phase IGBT inverter.
1. Đặt vấn đề
Việc sử dụng IGBT sẽ cải tiến chi phí điều khiển, vận hành và hiệu suất của hệ thống truyền động điện. Từ năm 2001, IGBT chịu điện áp 6.5kV đã ra đời, cho phép chế tạo các nguồn xoay chiều thông qua bộ nghịch lưu độc lập nguồn áp từ đầu vào 3.000V DC sử dụng trong các hệ truyền động sức kéo hiện nay.
Các kỹ thuật điều chế PWM phát triển mạnh mẽ trong nhiều thập kỷ qua như điều khiển phi tuyến PWM theo dải trễ dòng điện, điều khiển PI cho điều chế PWM tựa sin, điều chế PWM loại hài bậc cao [1][2]. Nhược điểm của các phương pháp này là:
- Chuyển mạch tuần tự nên thời gian đáp ứng lớn;
- Tần số chuyển mạch lớn;
- Chưa tính đến biến động lớn về mô-men trong thuật toán chuyển mạch;
- Khó khăn cho triển khai trên hệ thống điều khiển số hoặc hệ điều khiển lai.
Những tồn tại này là vấn đề đang được quan tâm và tiếp tục được nghiên cứu trong hệ truyền động sức kéo.
Trong bài báo, tác giả đề xuất thuật toán dự báo đáp ứng dòng tải, điều khiển chọn véc-tơ chuyển mạch điện áp tương ứng mà tối thiểu hóa sai lệch dòng điện và tối ưu hóa đáp ứng dòng tải khi tải có biến động lớn về mô-men.
2. Điều khiển dự báo dòng điện tải
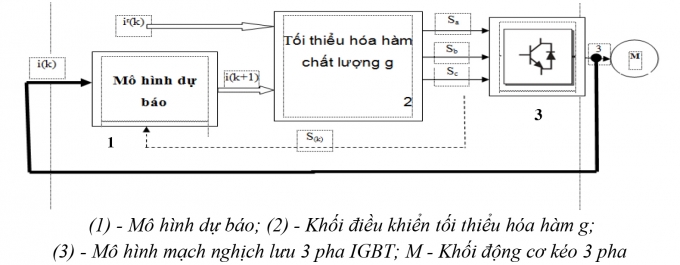
2.1. Sơ đồ cấu trúc điều khiển dự báo dòng điện
 |
| Hình 2.1 |
 |
| Hình 2.2 |
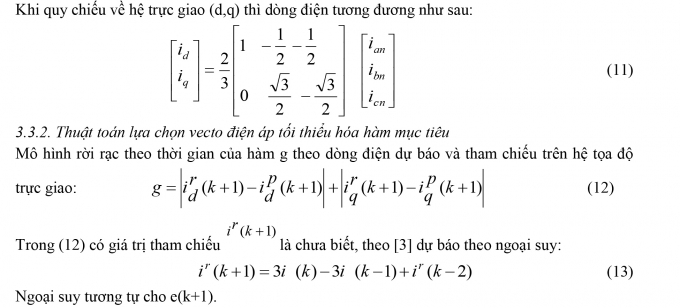
Hàm mục tiêu sử dụng trong thuật toán điều khiển dự báo:
 |
Hàm mục tiêu g phản ánh sai số giữa dòng điện tham chiếu và dòng dự báo được biểu diễn trên hệ tọa độ trực giao.
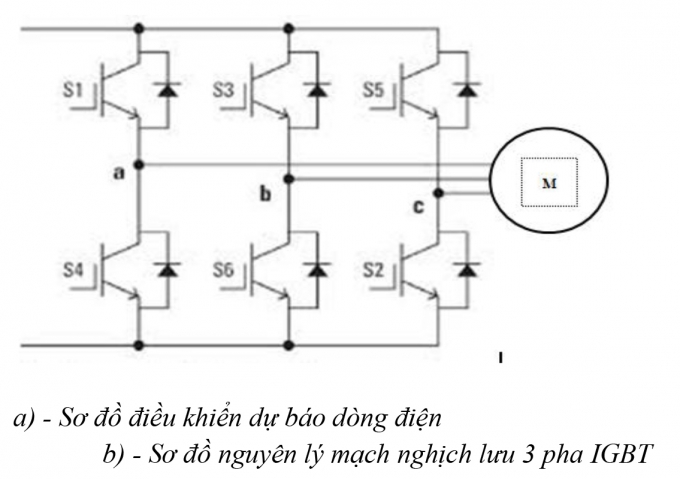
2.2. Tín hiệu điều khiển cho mạch nghịch lưu
Bộ nghịch lưu 3 pha IGBT như Hình 2.2 có các trạng thái chuyển mạch cho 6 van ở 3 pha được mô tả theo các véc-tơ chuyển mạch như ở Bảng 3.1 dưới đây.
Định nghĩa tín hiệu chuyển mạch cho 2 van pha A là Sa, 2 van pha B là Sb, 2 van pha C là Sc, thì các tín hiệu điều khiển mở các IGBT trong mạch nghịch lưu 3 pha ở Hình 2.2 tương ứng như sau: S1=Sa; S6 = `vecSb` ; S3=Sb; S4 = `vecSa` ; S5=Sc; S2 = `vecSc` .
Thuật toán được cài đặt trong khối điều khiển (2) ở Hình 2.1 tính toán các véc-tơ chuyển mạch điện áp, lựa chọn véc-tơ chuyển mạch điện áp tương ứng với sai lệch dòng tải nhỏ nhất khi có biến động về mô-men tải.
3. Luật điều khiển cho các IGBT
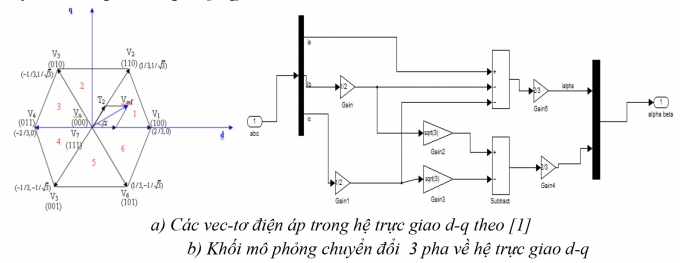
3.1. Các véc-tơ chuyển mạch điện áp cho nghịch lưu 3 pha IGBT
Khái niệm không gian véc-tơ xuất phát từ trường quay của động cơ xoay chiều và được sử dụng cho việc điều chế điện áp ra 3 pha. Trong kỹ thuật điều chế này, không gian 3 pha [a b c]t được chuyển đổi sang hệ trực giao [d q]t.
 |
| Hình 3.1 |
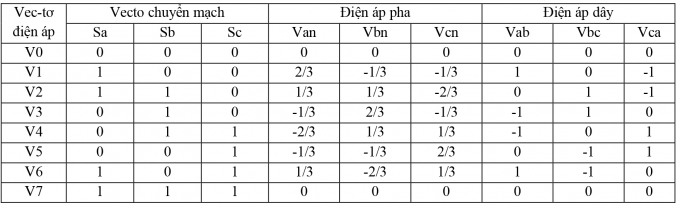
Bảng 3.1. Các vec-tơ trạng thái chuyển mạch
 |
Thuật toán dự báo vec-tơ chuyển mạch cho chu kỳ trích mẫu tiếp theo: Véc-tơ điện áp bất kỳ trong các véc-tơ từ V0-V7 được chọn cho bộ nghịch lưu nếu tối thiểu hóa hàm mục tiêu g.
3.2. Mô hình dự báo
3.2.1. Mô hình đối tượng điều khiển
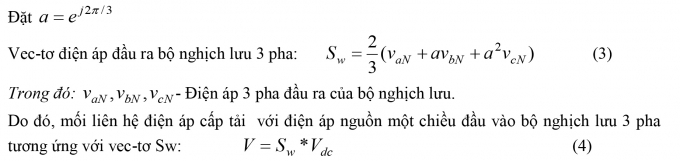
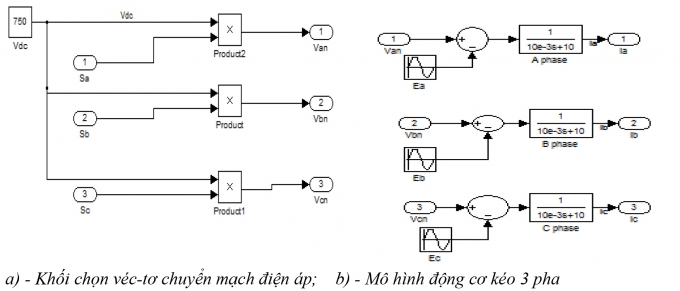
3.2.1.1. Mô hình bộ nghịch lưu 3 pha IGBT
 |
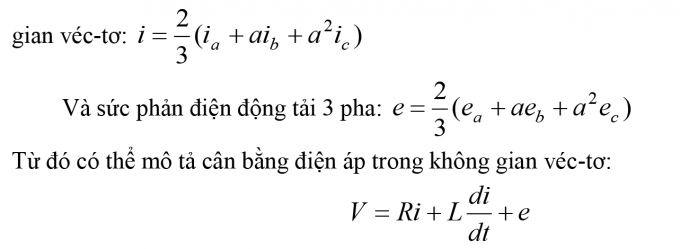
3.2.1.2. Mô hình động cơ kéo 3 pha
Giả thiết mô hình động cơ kéo đối xứng 3 pha, dòng điện có thể được định nghĩa trong không
 |
(5)
(6)
(7)
 |
| Hình 3.2 |
3.2.2. Mô hình rời rạc theo thời gian
Dạng mô hình rời rạc theo thời gian của dòng điện theo chu kỳ trích mẫu được thực hiện với xấp xỉ vi phân di/dt và thay vào (7) rút ra:
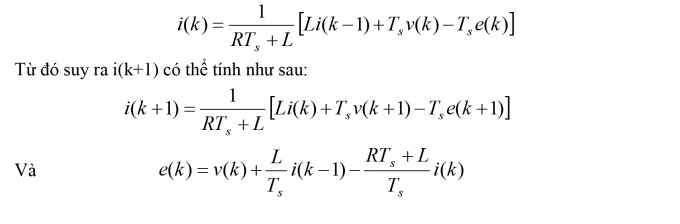 |
(8)
(9)
(10)
3.3. Luật điều khiển cho các IGBT trong mạch nghịch lưu 3 pha
3.3.1. Lựa chọn véc-tơ điện áp trong không gian véc-tơ cho bộ phát xung
Chọn các véc-tơ chuyển mạch điện áp từ V1 - V6 cho mạch nghịch lưu áp 3 pha, các giá trị điện áp pha Van, Vbn, Vcn và điện áp dây Vab, Vbc, Vca được tính tương ứng với từng véc-tơ chuyển mạch điện áp như Bảng 3.2.
 |
Thuật toán chọn vecto chuyển mạch điện áp như Hình 4.1.
3.4. Kết quả mô phỏng thuật toán
Các thông số mô phỏng: Nguồn đầu vào: Vdc=750V; thời gian trích mẫu: Ts= 25e-6; điện trở và điện cảm stato động cơ 3 pha R=10; L=10e-3;
Kết quả mô phỏng như Hình 4.2, kết quả mô phỏng cho thấy dòng điện của cả 3 pha đều có biên độ và góc pha đáp ứng yêu cầu bám theo giá trị đặt tham chiếu đầu vào.
4. Kết luận
Bài báo đề xuất thuật toán điều khiển chuyển mạch cho các IGBT của mạch nghịch lưu áp 3 pha trong không gian véc-tơ theo dự báo véc-tơ chuyển mạch điện áp tương ứng trong V0 - V7 cho chu kỳ điều chế tiếp theo mà tối ưu hóa đáp ứng dòng. Kết quả mô phỏng cho thấy, dòng điện tải là 3 pha sin sau khi kết thúc quá trình quá độ bám tốt theo các đại lượng tham chiếu đầu vào 3 pha. Kết quả dự báo này có ý nghĩa tiếp tới các bài toán điều khiển trực tiếp mô-men tải khi áp dụng cho hệ truyền động sức kéo yêu cầu điều chỉnh mô-men tải theo yêu cầu.
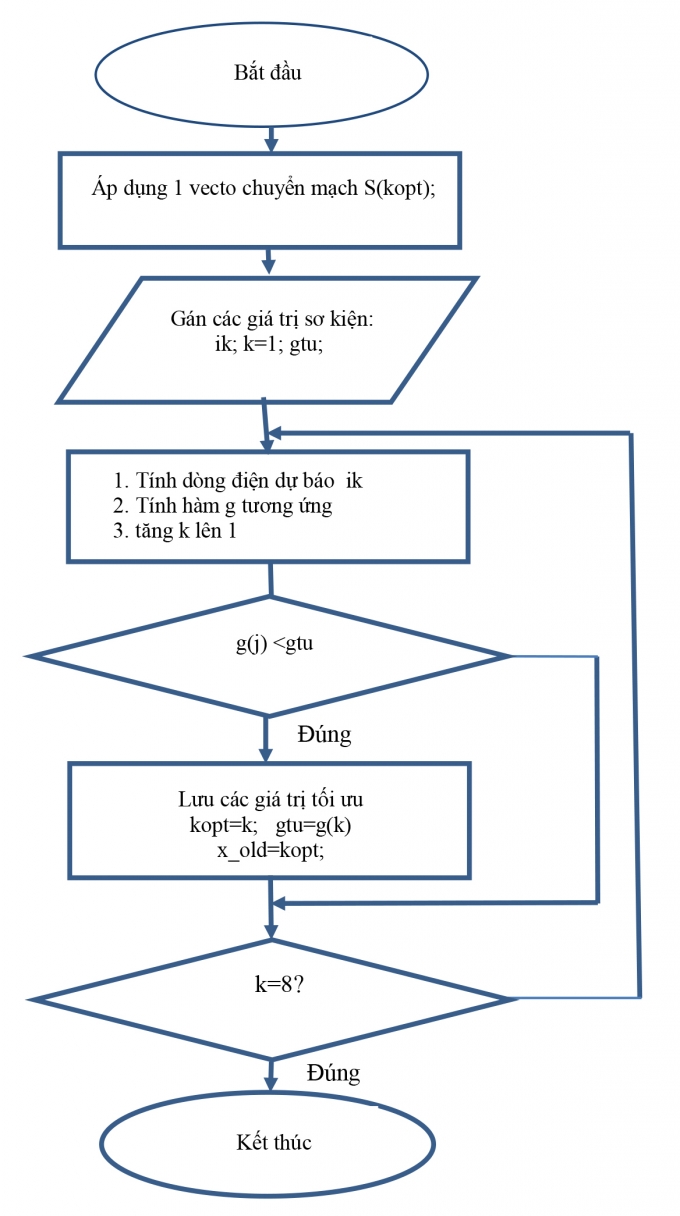 |
| Hình 4.1: Lưu đồ thuật toán chương trình |
tối thiểu hóa hàm mục tiêu, chọn véc-tơ chuyển mạch điện áp
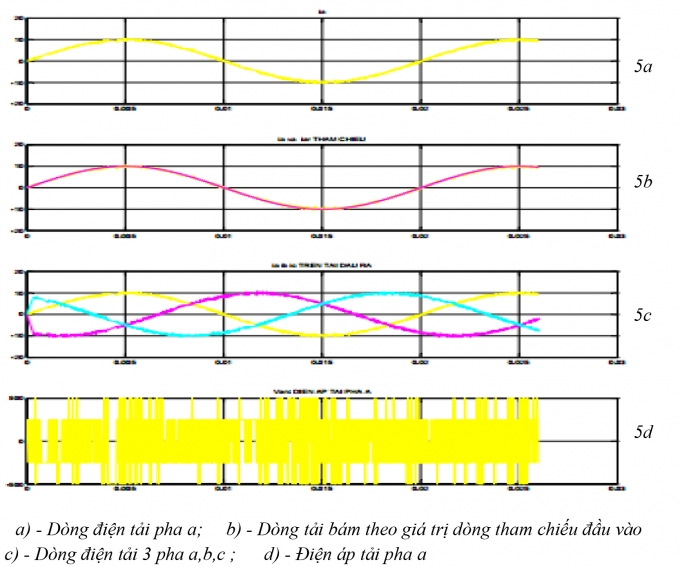 |
| Hình 4.2: Kết quả mô phỏng |
Tài liệu tham khảo
[1]. B.K.Bose (2012), Modern Power Electronics and AC drives, Prentice-Hall PTR.
[2]. S. Bernet (2000), Recent Developmentsof High Power Converters for Industry and Traction Applications, IEEE Transactions on Power Electronics.
[3]. Tobias Geyer, Georgios Papafotiou and Manfred Morari (2005), Model Predictive Control in Power Electronics: A Hybrid Systems Approach, 44th IEEE Conference on Decision and Control, and the European Control.
[4]. Jose R. Rodriguez (2007), Predictive current control of Voltage Source inverter, IEEE transactions on Industrial Eletronics,vol.52.
[5]. P. Cort´ es, M. P. Kazmierkowski, R. M. Kennel, D. E. Quevedo and J. Rodr´ýguez (2008), Predictive control in power electronics and drives, IEEE Transactions on Industrial Electronics, vol. 55, no. 12.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.