Liên hệ quảng cáo
Nâng cao chất lượng điều khiển quá trình cháy lò hơi trên cơ sở logic mờ PID
Điều khiển quá trình cháy lò hơi là điều khiển một quá trình nhiệt phức tạp của nhà máy nhiệt điện, thường sử dụng bộ điều khiển kinh điển PID để điều khiển quá trình.
|
TS. Đào Quang Thủy Bộ Khoa học và Công nghệ Người phản biện: TS. Ngô Mạnh Tiến TS. Đinh Anh Tuấn |
Tóm tắt: Điều khiển quá trình cháy lò hơi là điều khiển một quá trình nhiệt phức tạp của nhà máy nhiệt điện, thường sử dụng bộ điều khiển kinh điển PID để điều khiển quá trình. Bài báo ứng dụng phương pháp điều khiển logic mờ PID để triệt tiêu tác động xen kênh giữa hai kênh áp suất buồng đốt và nồng độ khí oxy dư trong khói. Tiến hành mô phỏng trên Matlab & Simulink cho thấy chất lượng điều khiển tốt, hạn chế được các tác động xen kênh.
Từ khóa: Lò hơi, bộ điều khiển kinh điển PID, buồng đốt.
Abstract: Control of boiler combustion control is a complex thermal process of power plants, usually using classical PID controller to control the process. This paper applied fuzzy PID control methods to eliminate inter-channel effects between the two channels chamber pressure and oxygen concentration in the smoke. Carry simulations on Matlab & Simulink show that the good quality control, and limit the impact on alternating channels.
Từ khóa: Boiler, classical PID controller, PID.
1. Đặt vấn đề
Hiện nay, các lò hơi thường được sử dụng bộ điều khiển PID, quá trình cháy lò hơi (QTCLH) thường rất phức tạp và đã có nhiều công trình nghiên cứu quá trình này và bước đầu đã giải quyết được việc nâng cao chất lượng nhiên liệu đầu vào, điều chỉnh tỷ lệ nhiên liệu/ không khí tối ưu, tổng hợp bộ điều khiển (BĐK) theo phương pháp kinh điển PID…, mà chưa hoặc ít chú ý đến ảnh hưởng các tác động xen kênh trong điều khiển do việc khảo sát cần mô hình ít sai số trong khi khối lượng tính toán lớn và phức tạp. Trong khi đó, từ những năm đầu của thập kỷ 90 đến nay, hệ điều khiển mờ (HĐK) đã được các nhà khoa học, các kỹ sư đặc biệt quan tâm nghiên cứu ứng dụng vào sản xuất. Khi sử dụng HĐK mờ kết hợp PID vào điều khiển quá trình đốt lò hơi sẽ tận dụng được ưu thế của bộ điều khiển PID và tận dụng được khả năng xấp xỉ tuyến tính với độ chính xác mong muốn của bộ điều khiển mờ. Phương pháp điều khiển mờ đặc biệt hữu ích với những đối tượng như QTCLH vì tính phi tuyến cao, các thông tin vào ra nhiều, nhiễu phức tạp.
2. Thiết kế bộ điều khiển mờ kết hợp PID cho quá trình cháy lò hơi
2.1. Mô hình đối tượng trong quá trình cháy
Tiến hành mô phỏng với đối tượng là quá trình cháy của một buồng đốt lò hơi [8]. Hệ điều khiển quá trình cháy gồm điều chỉnh áp suất chân không buồng đốt và điều chỉnh nồng độ oxy dư trong khói thải như sau: Quá trình cháy được mô phỏng sử dụng hai biến điều khiển là lượng khói thải và lượng khí cấp để điều chỉnh áp suất buồng lửa và nồng độ oxy trong khói [4]. Trên Hình 2.1, các hàm G11, G21, G12, G22 biểu diễn mối quan hệ của các biến điều khiển với các biến cần điều khiển. Các hàm truyền chọn là khâu quán tình bậc nhất có trễ
 |
.
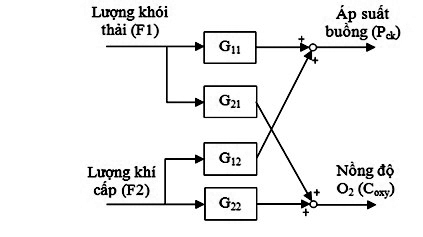 |
| Hình 2.1: Cấu trúc cháy có sự xen kênh |
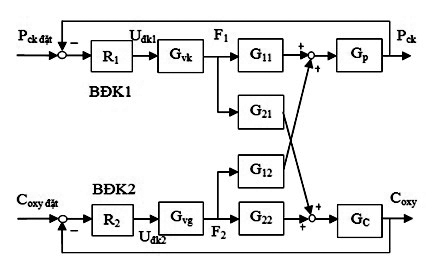 |
| Hình 2.2: Cấu trúc điều khiển hệ quá trình cháy |
Ngoài đối tượng là buồng đốt còn có các đối tượng khác như van điều khiển quạt khói, van điều khiển quạt gió và các thiết bị đo, ta có hệ thống đầy đủ như Hình 2.2 [4]. Tín hiệu sai lệch giữa giá trị đặt với tín hiệu ra được đưa vào các bộ điều khiển để thiết lập các tín hiệu điều khiển Uđk1 và Uđk2 tác động độ mở van quạt khói và quạt gió. Từ đó điều khiển được áp suất Pck và nồng độ Coxy.
2.2. Thiết kế hệ điều khiển mờ
Xác định các biến ngôn ngữ: Áp dụng mô hình mờ Mamdani [5] vào điều khiển hệ quá trình như Hình 2.2, ta có: ET = y đặt - yđo, TPET = ∫ETdt và Uđk là tín hiệu điều khiển độ mở van.
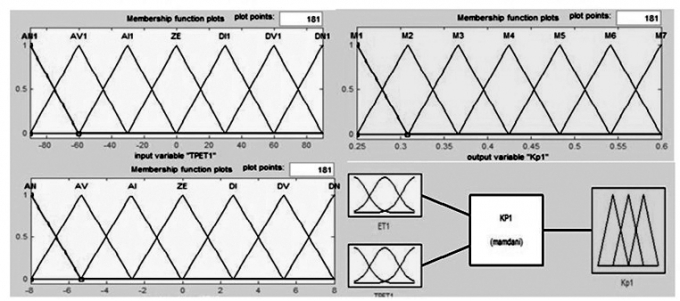 |
| Hình 2.3: Mờ hóa đầu vào ra cho bộ tính Kp |
Xác định số lượng tập mờ và hàm liên thuộc được định nghĩa bởi 7 tập mờ, có kiểu dạng hàm liên thuộc như Hình 2.3.
Luật hợp thành được tính theo luật Max - Min và giải mờ theo phương pháp trung bình trọng tâm.
Luật hợp thành như sau:
If TPET = i and ET = j then Udk = k, với:
k = i + j nếu -3 < i+j < 3;
k = -3 nếu i + j ≤ -3;
k = 3 nếu i + j ≤ 3;
(Các giá trị -3, -2, …3 là các tập mờ của hàm liên thuộc).
3. Kết quả mô phỏng
3.1. Khảo sát ảnh hưởng của tác động xen kênh
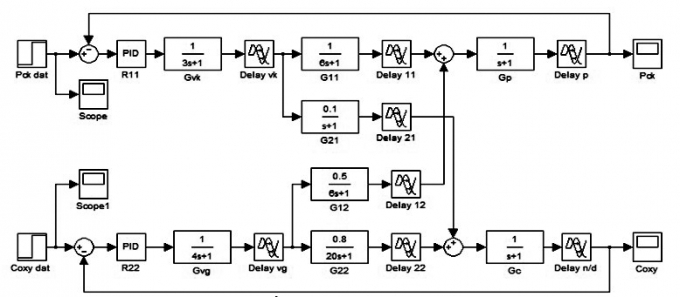 |
| Hình 3.1: Sơ đồ mô phỏng tác động xen kênh |
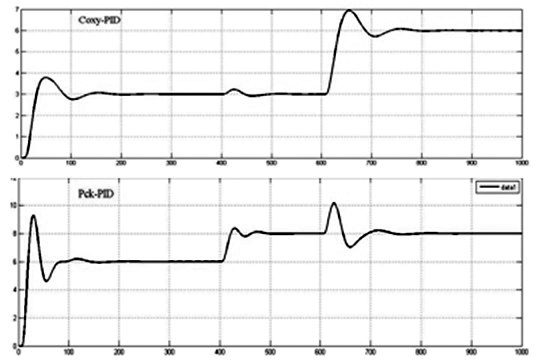 |
| Hình 3.2: Kết quả mô phỏng tác động xen kênh |
Tính toán trên từng kênh điều khiển độc lập sử dụng phương pháp tối ưu độ lớn để tìm ra 2 bộ điều khiển dạng PI thu được thông số như sau: BĐK1 (kp = 0,57; kI = 0,067), BĐK2 (kp = 1,1; kI = 0,05) [4]. Sử dụng 2 BĐK trên vào mô phỏng hệ quá trình cháy trên phần mềm Matlab & Simulink như Hình 3.1. Tiến hành chạy mô phỏng trên phần mềm Matlab trong thời gian 1000s để đánh giá sự xen kênh, ta thu được các đáp ứng như Hình 3.2:
Trong khoảng từ 0 đến 300s, tín hiệu đầu ra Pck có độ quá điều chỉnh rất lớn 67,33%, tăng số lần dao động và thời gian quá độ lớn Tqđ = 76.5s; tín hiệu Coxy có thời gian quá độ dài Tqđ = 120s hơn so với mạch độc lập và số lần dao động tăng, độ quá điều chỉnh 26.25%.
Trong khoảng thời gian từ 300s đến 500s, giá trị Pck đặt tăng, tác động lên tín hiệu đầu ra Coxy bị dao động rồi mới ổn định và có độ quá điều chỉnh là 6,25%.
Trong khoảng thời gian từ 500s đến 1.000s, giá trị Coxy tăng, tác động làm đầu ra Pck dao động nhiều lần với độ quá điều chỉnh lớn, mất khoảng thời gian dài mới quay về trạng thái bám giá trị đặt, độ quá điều chỉnh là 18,13%.
Như vậy, cần phải tổng hợp một bộ điều khiển triệt tiêu được tác động xen kênh và đảm bảo quá trình cháy luôn ổn định nhanh nhất khi có sự tác động của nhiễu.
3.2. Điều khiển bằng bộ điều khiển mờ
Xây dựng bộ điều khiển mờ điều khiển cho áp suất chân không Pck và nồng độ oxy dư Coxy [4].
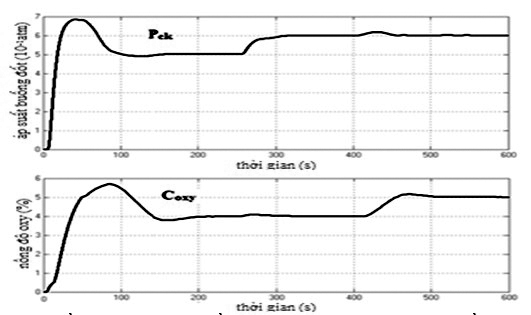 |
| Hình 3.3: Đồ thị đáp ứng đầu ra Pck và Coxy với bộ điều khiển mờ |
Trong khoảng từ 0 đến 250s, đáp ứng đầu ra Pck và Coxy đều nhanh chóng bám giá trị đặt, tuy nhiên độ quá điều chỉnh còn cao. Về Pck: Độ quá điều chỉnh 36%, Tqđ = 70s còn Coxy: Độ quá điều chỉnh 42.5%, Tqđ = 120s.
Bộ điều khiển mờ được sử dụng đã điều khiển được hệ quá trình cháy có sự xen kênh tương đối tốt. Độ quá điều chỉnh ở giai đoạn đầu còn tồn tại, vẫn chưa triệt tiêu hoàn toàn được các tác động xen kênh nhưng đã giảm sự xen kênh xuống mức rất nhỏ.
3.3. Điều khiển bằng bộ điều khiển mờ kết hợp PID
Sử dụng cấu trúc hệ điều khiển mờ vào hệ quá trình cháy, ta có sơ đồ mô phỏng trên Simulink như Hình 3.4.
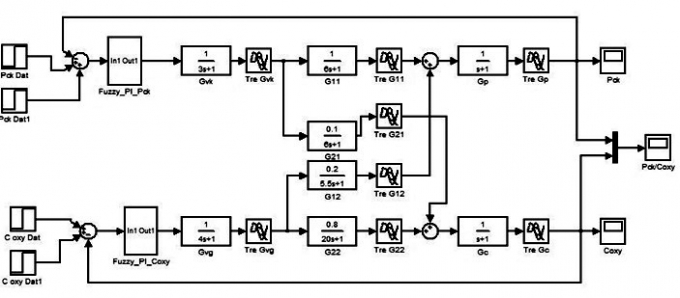 |
| Hình 3.4: Sơ đồ mô phỏng hệ quá trình cháy sử dụng bộ điều khiển mờ PID |
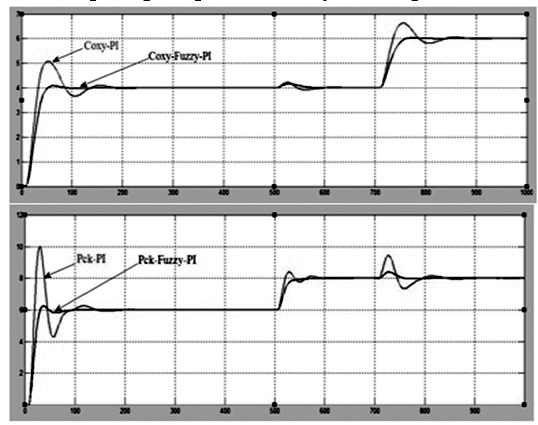 |
| h35Hình 3.5: Đồ thị đáp ứng đầu ra Pck và Coxy với bộ điều khiển mờ PID |
Tiến hành chạy mô phỏng quá trình trong khoảng thời gian là 1.000s, thu được kết quả như Hình 3.5: Tại thời điểm 500s, giá trị Pck tăng đầu vào từ 6 lên 8, ta thấy đáp ứng Pck nhanh bám giá trị đặt và có độ quá điều chỉnh nhỏ, còn đáp ứng Coxy tại thời điểm 500s dù có tác động xen kênh tăng nhưng đồ thị dao động ở mức nhỏ với độ quá điều chỉnh là 4,13%. Tại thời điểm 700s, giá trị Coxy tăng đầu vào từ 4 lên 6, ta thấy đáp ứng Coxy nhanh chóng bám giá trị mới là 6, và độ quá điều chỉnh nhỏ, còn đáp ứng Pck tại thời điểm 700s dù tác động xen kênh tăng nhưng đồ thị vẫn bám giá trị bằng 8, dao động ở mức nhỏ với độ quá điều chỉnh là 5%.Khi có tác động xen kênh tăng thì các tín hiệu đầu ra có giá trị gần như không dao động.
Như vậy, so sánh với bộ điều khiển PI sử dụng trong Hình 3.1 và bộ điều khiển mờ như Hình 3.3 thì bộ điều khiển mờ PID đã điều khiển tốt hệ quá trình cháy, giảm được sự xen kênh xuống mức rất nhỏ, các đáp ứng ra bám giá trị đặt ngay cả khi tín hệu xen kênh biến đổi.
4. Kết luận
Bài báo đã xây dựng hệ điều khiển sử dụng phương pháp mờ PID vào QTCLH. Các kết quả mô phỏng cho thấy bộ điều khiển không cần khối lượng tính toán phức tạp vẫn cho được kết quả điều khiển có chất lượng cao, giá trị cần điều khiển bám giá trị đặt nhanh chóng, khắc phục được điểm yếu của bộ điều khiển thông thường, đó là hệ vẫn ổn định dù có sự thay đổi của nhiễu tác động. Sự kết hợp giữa điều khiển logic mờ và PID đã tận dụng được những lợi thế của bộ PID đồng thời xử lý được những tín hiệu nhiễu, xen kênh của hệ mờ. Như vậy, hệ điều khiển mờ hoàn toàn đáp ứng được các yêu cầu cao về chất lượng cho quá trình cháy, cần tiếp tục hướng nghiên cứu tiến tới ứng dụng vào sản xuất.
Tài liệu tham khảo
[1]. Nguyễn Duy Bình, Phạm Quang Đăng, Bùi Quốc Khánh, Phạm Hồng Sơn (2006), Hệ điều khiển DCS cho nhà máy sản xuất điện năng, NXB. Khoa học kỹ thuật, Hà Nội.
[2]. Bùi Công Cường, Chu Văn Hỷ, Phan Xuân Minh, Nguyễn Doãn Phước, Nguyễn Hoàng Phương (1998), Hệ mờ và ứng dụng, NXB. Khoa học và kỹ thuật, Hà Nội.
[3]. Phạm Lê Dần, Nguyễn Công Hân (2005), Công nghệ lò hơi và mạng nhiệt, NXB. Khoa học và kỹ thuật, Hà Nội.
[4]. Nguyễn Đăng Hải, Nâng cao chất lượng điều khiển quá trình đốt cho nồi hơi trên cơ sở mờ lai, Luận văn Thạc sĩ, Đại học GTVT Hà Nội.
[5]. Nguyễn Như Hiển, Lại Khắc Lãi (2007), Hệ mờ và nơron trong kỹ thuật điều khiển, NXB. Khoa học tự nhiên và công nghệ, Hà Nội.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.