Liên hệ quảng cáo
Nghiên cứu bộ điều tốc điện tử cho động cơ diesel lai chân vịt tàu thủy
Bộ điều tốc là một bộ phận quan trọng và cần thiết của bất cứ động cơ diesel nào. Nó điều chỉnh tốc độ của diesel thông qua lượng nhiên liệu phun.
|
ThS. Nguyễn Xuân Trụ Viện Kỹ thuật Hải quân Người phản biện: TS. Đào Minh Quân TS. Vương Đức Phúc |
Tóm tắt: Bộ điều tốc là một bộ phận quan trọng và cần thiết của bất cứ động cơ diesel nào. Nó điều chỉnh tốc độ của diesel thông qua lượng nhiên liệu phun. Bộ điều tốc chính là bộ phận rất nhạy với tốc độ thực của diesel được thiết kế để duy trì tốc độ diesel không đổi bất chấp sự thay đổi của tải trên đó. Có nhiều loại bộ điều tốc khác nhau như bộ điều tốc cơ khí, cơ khí kết hợp thủy lực, điện tử... Tuy nhiên, bài báo chỉ bộ điều tốc điện tử được đi sâu trình bày.
Từ khóa: Bộ điều tốc điện tử, động cơ diesel, điều tốc cơ khí.
Abstract: A vital component of any diesel engine system is the governor, which limits the speed of the engine by controlling the rate of fuel delivery. A governor is essentially a speed-sensitive device, designed to maintain a constant engine speed regardless of load variation. There are many types and variations of governors such as mechanical governor, mechanical-hydraulic type governor, electronic governor; however, in this paper, only the electronic type governor will be reviewed will be reviewed.
Keywords: Electronic speed regulator, diesel, mechanical speed regulator.
1. Giới thiệu
Đối với các động cơ diesel lai chân vịt lắp đặt cho tàu thủy, việc phụ tải thay đổi là thường xuyên và đột ngột do sóng biển, luồng lạch và các chế độ hoạt động, do vậy, bộ điều tốc quyết định đến thời gian và hiệu quả kinh tế trong khai thác. Duy trì cho tốc độ động cơ ổn định ở tốc độ mong muốn mà không phụ thuộc vào tải cần có bộ điều tốc kèm theo. Đối với các thế hệ động cơ lai chân vịt của Nga (Liên Xô cũ) đang được lắp đặt trên các tàu của Hải quân đều được trang bị các bộ điều tốc cơ khí kiểu quả văng dựa trên nguyên tắc cân bằng lực ly tâm điều chỉnh lực căng của lò xo để điều chỉnh lượng nhiên liệu cấp cho động cơ. Sau thời gian dài hoạt động, các cơ cấu cơ khí, lò xo đã xuống cấp và làm việc kém tin cậy. Nhược điểm của các bộ điều tốc kiểu này là tiêu hao nhiều nhiên liệu, cơ cấu cơ khí cồng kềnh, phức tạp, khó khăn trong việc bảo dưỡng và lắp đặt. Hiện nay, bộ điều tốc điện tử được áp dụng cho động cơ thế hệ mới của các nước tư bản là ứng dụng thành quả sự phát triển mạnh mẽ của công nghệ điện tử, tin học. Ưu điểm của các bộ điều tốc điện tử là điều khiển mềm dẻo và dễ dàng, tiết kiệm tiêu hao nhiên liệu; tích hợp được thêm nhiều chức năng khác như giám sát và bảo vệ. Điển hình là các hãng động cơ lớn như MTU (MDEC), MAN(VIKING-25), CATERPILAR(ECM)...
2. Sơ đồ khối và mô hình toán của bộ điều tốc
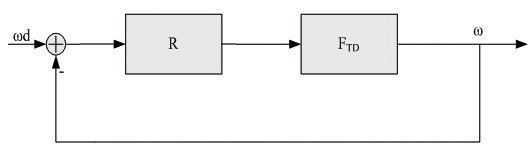
Sơ đồ khối của bộ điều tốc điện tử được thể hiện trên Hình 2.1. Trong đó, bộ điều khiển (BĐK), cơ cấu chấp hành (CCCH) (thường là các van dòng hay áp có tín hiệu tượng tự), đối tượng điều khiển (ĐTĐK) (chính là động cơ diesel). Tốc độ thực của diesel được cảm biến thông qua cảm biến tốc độ dạng xung, tín hiệu này được so sánh với tín hiệu đăt (wd). Nếu có sai lệch, BĐK sẽ đưa tín hiệu thay đổi cho CCCH nhằm thay đổi lượng nhiên liệu cấp cho vòi phun của diesel (ĐTĐK) giúp cho tốc độ luôn ổn định theo giá trị đặt trước.
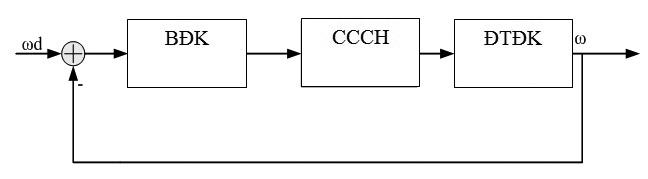 |
| Hình 2.1: Sơ đồ khối của bộ điều tốc điện tử |
Hệ phương trình toán học để mô tả đối tượng động cơ diesel có độ phi tuyến cao và rất phức tạp, do vậy, để đơn giản trong tính toán và xây dựng các bộ điều khiển cho đối tượng này ta dùng phương pháp thực nghiệm. Giải pháp điều khiển để ổn định tốc độ động cơ của các hãng là sử dụng bộ điều khiển PID, các tham số của bộ điều khiển PID là các tham số động thay đổi trên toàn dải tốc độ làm việc của động cơ (từ miền tốc độ thấp đến miền tốc độ cao). Tùy thuộc từng hãng sẽ có những thuật toán lựa chọn các tham số PID khác nhau:
Đối với bộ điều tốc điện tử của hãng MAN “VIKING-25”, các tham số của bộ điều khiển PID được chia thành 02 bộ tham số động: 01 bộ tham số PID khi động cơ không có tải, 01 bộ tham số PID khi động cơ có tải. Việc thiết lập các tham số ban đầu cho bộ điều khiển PID có thể được thực hiện bằng phần mềm cài đặt trên máy tính PC.
Đối với bộ điều tốc điện tử của hãng MTU “ECU4”, bộ điều khiển sử dụng cũng là bộ PID. Tín hiệu phản hồi của bộ điều khiển là tín hiệu tốc độ và được so sánh với tín hiệu đặt, sai lệch tín hiệu tốc độ được đưa vào bộ điều khiển PID, sau khi qua các khâu hạn chế nhiên liệu tín hiệu điều khiển sẽ điều khiển cơ cấu chấp hành thay đổi nhiên liệu để duy trì ổn định tốc độ cho động cơ.
Như vậy, hiện nay, các hãng chế tạo điều tốc điện tử cho động cơ diesel trên thế giới đang sử dụng bộ điều khiển PID. Các bộ tham số cho các bộ điều khiển PID là các tham số động thay đổi từ miền tốc độ thấp đến miền tốc độ cao để đảm bảo duy trì ổn định tốc độ cho động cơ ở các chế độ làm việc khác nhau mà không phụ thuộc vào tải.
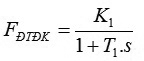
Để đơn giản cho quá trình tính toán và xây dựng bộ điều khiển, ta có thể coi động cơ diesel (ĐTĐK) có mô hình toán học đơn giản là một khâu quán tính bậc nhất có hàm truyền đạt như sau:
 |
(1)
Tương tự, để thuận tiện cho việc tính toán, ta coi CCCH có mô hình toán học đơn giản cũng là một khâu quán tính bậc nhất có hàm truyền đạt như sau:
(2)
Từ sơ đồ cấu trúc chung của mạch điều chỉnh tốc độ cho hệ thống như trên ta có hàm truyền đạt của ĐTĐK - CCCH có thể được tính như sau:
 |
(3)
Theo hàm truyền đạt trên của đối tượng cần điều chỉnh thì ta thấy rằng, trong hàm truyền đạt của đối tượng, ta chỉ cần xác định được hệ số khuyếch đại K và hai hằng số thời gian T1 và T2 thì ta hoàn toàn có thể xây dựng được bộ điều khiển cho đối tượng.
3. Xây dựng bộ điều khiển PID dùng s7-200
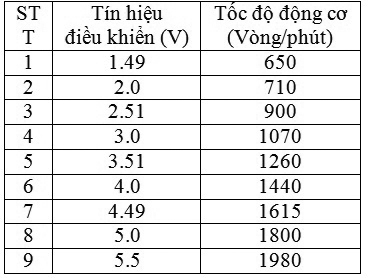
Lựa chọn động cơ diesel S3L2 (3TN84) đồng bộ với các cảm biến đo nhiệt độ, áp lực, tốc độ đảm bảo tương đương như một động cơ đang sử dụng trên thực tế. Thiết bị vận hành để người sử dụng đặt tốc độ cũng được lựa chọn để tiến hành việc thử nghiệm và hoàn thiện sản phẩm. Để xác định được hệ số khuyếch đại Kω cho đối tượng điều khiển trên, ta có thể thực hiện bằng cách đo đạc và thực nghiệm trên mô hình vật lý. Tín hiệu đầu vào điều khiển tốc độ của động cơ diesel là một tín hiệu điện áp điều khiển, đầu ra chính là tốc độ của động cơ. Các thông số được đo trên mô hình vật lý được thể hiện trong Bảng 3.1.
Bảng 3.1. Tín hiệu điều khiển và tốc độ động cơ
 |
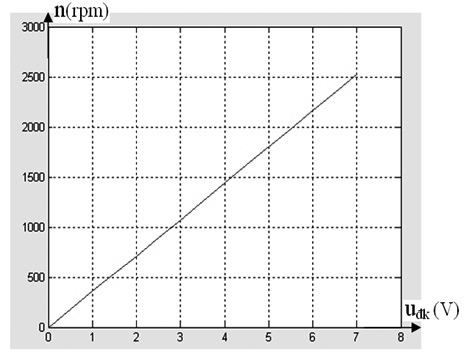 |
| Hình 3.1: Đặc tính quan hệ giữa tín hiệu điều khiển và tốc độ của động cơ diesel |
Dựa vào bảng thông số khảo sát được giữa tín hiệu đầu vào điều khiển và tín hiệu đầu ra của đối tượng thực ta vẽ được đặc tính điều chỉnh tốc độ như sau:
Dựa vào mối quan hệ giữa tín hiệu điều khiển cho bộ biến đổi và tốc độ của động cơ hình vẽ trên, ta thấy rằng: Quan hệ giữa tín hiệu ra (tốc độ động cơ) và tín hiệu điều khiển cho bộ biến đổi là tương đối tuyến tính. Nếu coi hệ động cơ diesel - cơ cấu chấp hành có hàm truyền như trên thì hệ số khuếch đại Kω của đối tượng có thể được lấy bằng hệ số khuếch đại giữa tín hiệu ra tốc độ và tín hiệu điều khiển. Qua bảng thông số và đặc tính trên ta có thể chọn Kω= 360.
Hai hằng số thời gian là T1 và T2 được xác định bằng thực nghiệm. Xác định hai thông số này được thực hiện bằng cách thay đổi tín hiệu vào điều khiển và đo khoảng thời gian từ khi tín hiệu đầu vào thay đổi cho tới khi tín hiệu đầu ra đã chuyển sang trạng thái xác lập mới. Dựa vào kết quả đo đạc ta có các thông số như sau: T1 = 0,001 và T2 = 0,05.
Như vậy, hàm truyền đạt của đối tượng điều khiển lúc này trở thành như sau:
(4)
Xây dựng mạch điều chỉnh tốc độ cho đối tượng. Để tổng hợp bộ điều chỉnh tốc độ cho hệ, ta có thể áp dụng tiêu chuẩn mô-đun tối ưu như sau:
Hàm chuẩn theo tiêu chuẩn mô-đun tối ưu là hàm có dạng:
(5)
Hàm truyền của đối tượng có dạng như sau:
(6)
Gọi hàm truyền đạt của bộ điều khiển là R(s). Lúc này cấu trúc của mạch vòng điều chỉnh là:
 |
| Hình 3.2: Cấu trúc mạch điều khiển tốc độ động cơ |
Với sơ đồ cấu trúc hệ thống như hình vẽ trên ta có hàm truyền của hệ kín là:
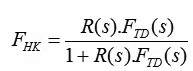 |
(7)
Để hệ kín có cấu trúc giống với hàm chuẩn của tiêu chuẩn mô-đun tối ưu thì ta có. Thay thế vào phương trình trên ta có hàm truyền của bộ điều chỉnh tốc độ được tính như sau:
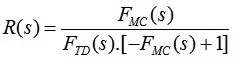 |
(8)
Thay hàm chuẩn vào phương trình trên ta có:
 |
(9)
Thay
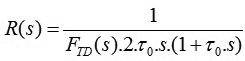
vào phương trình trên ta có hàm truyền của bộ điều chỉnh tốc độ là:
(10)
Ta chọn τo= 0.001 thì ta có bộ điều khiển là:
 |
(11)
Như vậy, bộ điều khiển sẽ là một khâu PI. Với hệ số khuyếch đại của từng khâu như sau:
Khâu P:
 |
4. Kết quả chạy thử nghiệm
Chế độ khởi động máy (Hình 4.1)
Ta thấy rằng, tốc độ máy (đường màu đỏ) tăng dần và sau đó bám ngay vào đường giá trị tốc độ mong muốn (đường màu xanh), như vậy, độ quá điều chỉnh trong quá trình khởi động máy là không có, gần như tiệm cận về 0 (lưu ý rằng giá trị đặt 10.500 tương ứng với tộc độ thực của động cơ là 1.500 vòng/phút). Đặc tính chỉ ra quá trình khởi động như vậy sẽ tiết kiệm tiêu hao nhiên liệu hơn và hạn chế khói cho động cơ. Đường đặc tính điều khiển phun nhiên liệu tăng lên lúc bắt đầu khởi động sau đó giảm nhanh xuống để hạn chế nhiên liệu cấp cho động cơ, nhanh chóng đưa tốc độ động cơ về giá trị đặt mong muốn. Sau khi khởi động xong máy sẽ chạy ở tốc độ không tải. Ta nhận thấy rằng, tốc độ này bám sát với tín hiệu đặt với sai lệch tĩnh gần như bằng 0.
- Sai lệch tĩnh (sai số điều chỉnh): ± 1%
- Độ quá điều chỉnh: -7 ¸ 5%
- Thời gian quá độ: 1,5 giây
- Số lần dao động: 1
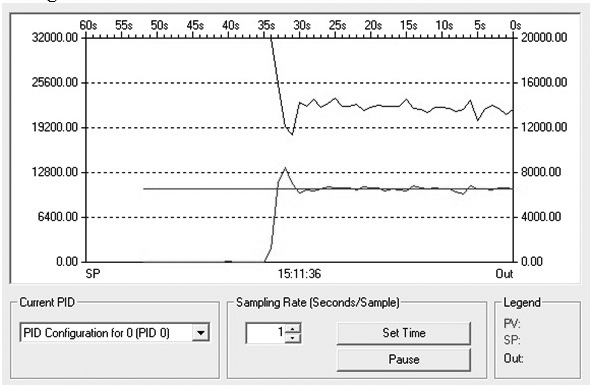 |
| Hình 4.1: Chế độ khởi động máy |
5. Kết luận và hướng hoàn thiện nghiên cứu
Bộ điều tốc điện tử đã đáp ứng tốt các chế độ theo chỉ tiêu đề ra. Tuy nhiên, so với các hãng nước ngoài thì 4 tham số điều khiển vẫn còn cao, việc các tham số chỉ tiêu vẫn còn cao có thể được chỉ ra do các nguyên nhân sau:
- Đối tượng thử nghiệm là động cơ hiện đã cũ và kém ổn định hơn;
- Quá trình thiết kế tổng hợp bộ điều khiển sử dụng phương pháp thực nghiệm, trong quá trình tính toán đã tuyến tính hóa các phép toán, không thể hiện được đặc tính phi tuyến của đối tượng; đơn giản hóa mô hình toán của đối tượng điều khiển ĐTĐK là khâu quán tính bậc nhất;
- Chưa tối ưu được tham số cho bộ điều khiển.
Hướng tiếp theo sẽ tối ưu các chỉ tiêu đáp ứng của bộ điều tốc tiệm cận đến bộ điều tốc của các hãng nước ngoài như: MTU, MAN và Caterpillar….
Tài liệu tham khảo
[1]. Iwai Tomohiro, Ohtoshi Kohta, Fukumori Eijietal, Development of An Electronic Governor for The Power Generator System, International Off-Highway and Powerplant Congress and Exposition, Milwaukee WI USA, 1990:180-189.
[2]. Damir Radan (2008), Marine Power Plant Control System[R], Department of Marine Technology Norwegian University of Science and Technology.
[3]. Li Haoju, Chen Hongwei (2009), Modeling and Simulation of Power Supply Unit in Electric Propulsion Ship [J], Marine Electronic Technology, (11):18-22.
[4]. Hopka, M., Upadhyay, D., Guezennec, Y. and Rizzoni, G. (2003), Identification of a mean value model of a modern diesel engine for control design, ASME International Mechanical Engineering Congress, Washington, D. C.
[5]. Vasu, J., Deb, A. K., Mukhopadhyay, S. and Pattada, K. (2011), Development and validation of an MVEM from an SI-engine based WCCM, In: Proceedings of 2011 International Conference on Modelling, Identification and Control, Shanghai, China.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.