Liên hệ quảng cáo
Nghiên cứu mô phỏng nguồn động lực xe hybrid kiểu song song bằng phần mềm AVL-Cruise
Bài báo trình bày kết quả nghiên cứu mô phỏng nguồn động lực trên xe hybrid kiểu song song.
|
ThS. Trần Văn Đăng PGS. TS. Khổng Vũ Quảng TS. Trần Đăng Quốc KS. Trần Tuấn Anh Trường Đại học Bách khoa Hà Nội Người phản biện: TS. Trần Thị Thu Hương TS. Nguyễn Tường Vi |
Tóm tắt: Bài báo trình bày kết quả nghiên cứu mô phỏng nguồn động lực trên xe hybrid kiểu song song. Các nguồn động lực động cơ đốt trong, động cơ điện và ắc quy cho xe hybrid kiểu song song có công suất Ne-max = 10 kW, được tính toán bằng phần mềm AVL-Cruise. Kết quả nghiên cứu là cơ sở quan trọng và hữu ích, có thể sử dụng để hỗ trợ trong giai đoạn đầu quá trình thiết kế chế tạo xe hybrid ở Việt Nam.
Từ khóa: Xe hybrid, bộ chia công suất, phần mềm AVL-Cruise.
Abstract: This article presents the results of simulation studies on motor parallel hybrid type. The energy source for internal combustion engines, electric motors and batteries for hybrid vehicles with a capacity parallel kind Ne-max = 10 kW, is done by AVL-Cruise software. The study results are an important basis and useful, can be used to aid in the early stages design process making hybrids in Vietnam.
Keywords: Hybrid vehicle, power divider, AVL-Cruise software.
1. Đặt vấn đề
Những năm gần đây, tình trạng ô nhiễm không khí đã trở nên ngày càng nghiêm trọng. Để bảo vệ môi trường và nâng cao chất lượng không khí tại các thành phố lớn, chính phủ các nước đã đưa ra các quy định ngặt nghèo về tiêu thụ nhiên liệu và khí thải của xe. Đây là nguồn động lực chính thúc đẩy các hãng xản xuất ô tô đầu tư phát triển các công nghệ mới, thân thiện với môi trường cho các dòng sản phẩm của mình, trong đó phải kể đến xe điện (EV) và xe điện hybrid (HEV) [1, 2]. Với ưu điểm vượt trội về đặc tính kéo, hiệu suất và không gây ô nhiễm môi trường trong thành phố của xe EV so với xe sử dụng động cơ đốt trong (ĐCĐT) truyền thống, xe EV có thể được coi là hướng phát triển có nhiều triển vọng.
Tuy nhiên, do khả năng lưu trữ năng lượng trong ắc quy còn thấp, thời gian mỗi lần sạc kéo dài, tuổi thọ sử dụng ngắn, tự trọng lớn và giá thành cao đã làm hạn chế phạm vi khai thác của xe EV [1]. Do vậy, xe HEV sử dụng phối hợp hai nguồn động lực, gồm động cơ điện (ĐCĐ) và ĐCĐT được cho là giải pháp hợp lý hiện nay, vì cho phép phát huy ưu điểm của ĐCĐ và ĐCĐT, cũng như khắc phục được các nhược điểm của chúng. Cùng xu hướng phát triển của thế giới, hiện nay dòng xe HEV đã xuất hiện nhiều ở Việt Nam. Do xe HEV có công nghệ phức tạp cả về kết cấu và hệ điều khiển, nên đã làm ảnh hưởng không nhỏ đến hiệu quả khai thác, sử dụng, bảo dưỡng và sửa chữa, thậm chí cả công tác quản lý của Nhà nước về các dòng xe này ở Việt Nam. Hơn nữa, đây là công nghệ mới, vẫn còn là bí mật của các hãng, nên việc tiếp cận công nghệ này cũng gặp rất nhiều khó khăn.
Chính vì vậy, nghiên cứu thiết kế chế tạo để làm chủ công nghệ xe HEV cũng như định hướng sản xuất xe HEV ở Việt Nam là cần thiết và có tính thời sự. Để giải quyết một phần các vấn đề nêu trên, bài báo sẽ tập trung nghiên cứu thiết kế tính toán hệ động lực và chiến lược điều khiển trên xe HEV kiểu song song bằng phần mềm AVL-Cruise. Kết quả nghiên cứu của bài báo có thể được coi là cơ sở quan trọng bước đầu cho việc nghiên cứu thiết kế tính toán và chế tạo xe HEV tại Việt Nam.
2. Các dạng kết hợp nguồn động lực trên xe hev
Xe HEV sẽ được trang bị một ĐCĐT truyền thống, một bình chứa nhiên liệu, ắc quy, một hay nhiều ĐCĐ và máy phát điện (MPĐ). Tuy nhiên, xe HEV được phân thành 3 loại kết hợp nguồn động lực, gồm: HEV nối tiếp, HEV song song và HEV kết hợp [1, 2].
- Kết hợp nguồn động lực HEV nối tiếp
Đối với HEV nối tiếp ĐCĐT hoạt động truyền chuyển động kéo cho MPĐ làm việc để phát điện. Dòng điện được sinh ra chia làm hai phần, một để sạc ắc quy và một sẽ cấp năng lượng cho ĐCĐ. Động cơ điện truyền lực đến các bánh xe chủ động.
- Kết hợp nguồn động lực HEV song song
HEV song song cho phép cả hai ĐCĐ và ĐCĐT cùng cung cấp năng lượng song song tới cầu xe, trong đó ĐCĐT cung cấp năng lượng cơ học đến các bánh xe giống như các xe ĐCĐT truyền thống. HEV được hỗ trợ bởi một motor điện, nó được nối với hệ thống truyền lực qua khớp cơ khí. Do đó, tốc độ quay của ĐCĐT phụ thuộc vào quãng đường xe chạy, vì vậy ĐCĐT có thể hoạt động dựa trên miền làm việc tối ưu và nạp điện cho ắc quy.
- Kết hợp nguồn động lực HEV kết hợp
HEV kết hợp cho phép cả hai ĐCĐ và ĐCĐT cùng cung cấp năng lượng song song tới cầu xe, trong đó, ĐCĐT, ĐCĐ cung cấp năng lượng đến các bánh xe thông qua sự điều khiển đóng ngắt của khớp nối. MPĐ được ĐCĐT truyền chuyển động để nạp điện và cung cấp điện cho ĐCĐ thông qua khớp nối điều khiển. Mặc dù sự phức tạp của cấu trúc dẫn đến công nghệ sản xuất tốn kém hơn nhưng HEV kết hợp lại linh hoạt hơn trong việc kiểm soát. Một số HEV hiện đại thích áp dụng hệ thống này.
Để xây dựng quy trình tính toán thiết kế xe HEV cũng như làm chủ công nghệ xe HEV, việc nghiên cứu tính toán hệ động lực HEV kiểu song song được coi là bước ban đầu. Vì vậy, bài báo sẽ tập trung nghiên cứu mô phỏng hệ động lực HEV kiểu song song bằng phần mềm AVL-Cruise.
3. Mô phỏng hệ phối hợp nguồn động lực xe hev bằng phần mềm avl-cruise
3.1. Phần mềm AVL-Cruise
Phần mềm AVL-Cruise được sử dụng chủ yếu cho việc tính toán và tối ưu như: Tiêu thụ nhiên liệu và khí thải, khả năng vận hành; tính toán tỉ số truyền, hiệu suất phanh, tải trọng tập trung khi tính toán ứng suất, rung động gây ra. Các mô-đun của phần mềm AVL- Cruise cho phép có thể mô phỏng tất cả các mẫu xe hiện tại và tương lai. Hơn nữa, phần mềm AVL-Cruise có thể kết hợp để nghiên cứu khả năng vận hành, mức tiêu thụ nhiên liệu và khí thải của xe trong các điều kiện khác nhau như: Tăng tốc, tốc độ tối đa, khả năng leo dốc [3]...
Các tính năng chính của phần mềm AVL-Cruise thể hiện cụ thể như:Phần mềm có thể dùng xây dựng mô hình các hệ thống truyền lực phức tạp, kết hợp sử dụng các mô hình với mô-đun khác nhau, xác định được mức tiêu thụ nhiên liệu xe, khả năng leo dốc, lực kéo, gia tốc, tốc độ, tăng tốc giảm tốc, lực phanh và có thể nhanh chóng xây dựng một chiếc xe điện thuần túy hoặc các mô hình xe hybrid và thông qua MATLAB, thiết kế được chiến lược xe, thuận tiện cho các chế độ truyền tải (AT, AMT, DCT, CTV...). Đồng thời, mô phỏng hệ thống xe theo thời gian thực, mô phỏng theo yêu cầu, hệ thống truyền động, ECU và có thể tìm và phát hiện lỗi giúp nâng cao hiệu quả quá trình mô phỏng [4].
3.2. Nguồn động lực cho xe HEV
Từ mục tiêu xây dựng HEV có công suất Ne=10kW, trong đó ĐCĐT có Ne= 6,5kW, ĐCĐ có Ne= 4kW cụ thể như sau [2]:
ĐCĐT được sử dụng là động cơ một xi-lanh sử dụng xăng làm nhiên liệu, tốc độ tối đa là 7.000 vòng/phút và mô-men xoắn là 12Nm, Ne = 8,5kW, chế độ chạy trong HEV tối ưu là: Tốc độ tối đa là 5.000 vòng/phút và mô-men xoắn là 12Nm, Ne = 6,5kW.
ĐCĐ một chiều không có chổi than có công suất định mức 4kW, tốc độ tối đa 6.000 vòng/phút, hiệu điện thế sử dụng 48V.
3.3. Mô hình mô phỏng nguồn động lực cho xe HEV
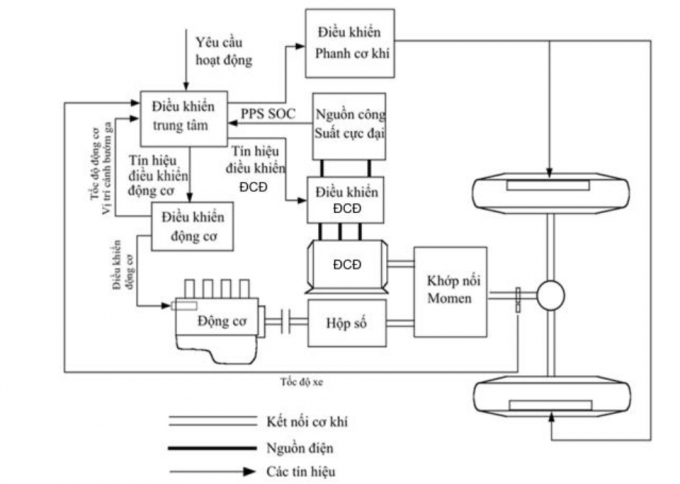 |
| Hình 3.1: HEV song song |
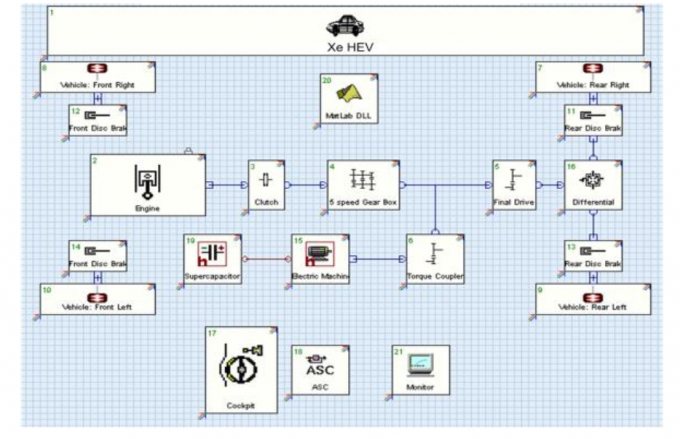 |
| Hình 3.2: Mô hình HEV trong AVL - Cruise |
Trên cơ sở hệ động lực hybrid kiểu song song thể hiện trên Hình 3.1, trong đó gồm các nguồn động lực và các thành phần sau: ĐCĐT, ĐCĐ, bộ điều khiển ĐCĐ và ĐCĐT và khớp nối mô-men [5].
Nhóm nghiên cứu đã xây dựng mô hình mô phỏng nguồn động lực hybrid kiểu song song trên phần mềm AVL-Cruise như thể hiện trên Hình 3.2. Để đánh gia so sánh ưu việt của hệ hybrid kiểu song song và hệ động lực xe thông thường, nhóm nghiên cứu cũng thực hiện xây dựng mô hình xe thông thường bằng phần mềm AVL-Cruise như thể hiện trên Hình 3.3.
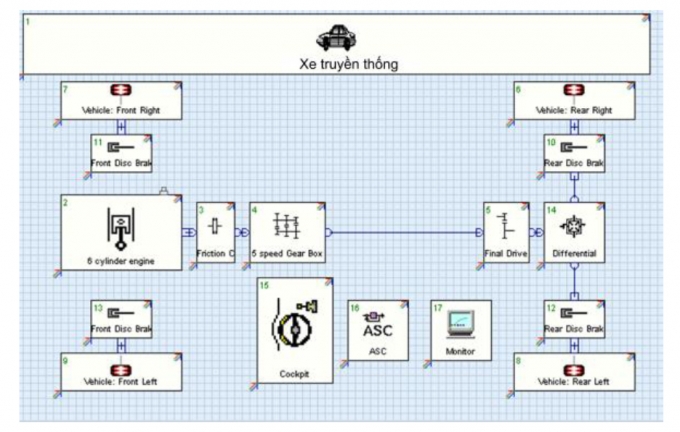 |
| Hình 3.3: Mô hình thông thường tron AVL/CRUISE |
Xe HEV được sản xuất bằng cách thêm vào một tập hợp các hệ thống điện trên cơ sở của xe thông thường. Khi ĐCĐ làm việc giúp nâng cao hiệu suất năng lượng của chiếc xe và làm giảm được sự tiêu thụ nhiên liệu của ĐCĐT. Xe HEV bao gồm ắc quy, ĐCĐ, một bộ điều khiển trung tâm và ĐCĐT [5,6]. Hình 3.2 cho thấy, các thành phần ắc quy hỗ trợ các điện áp yêu cầu của ĐCĐ. Bộ ghép mô-men xoắn là một quả lê bánh răng tỷ lệ duy nhất. Các thành phần Matlab là một giao diện của Matlab/Simulink để tích hợp ĐCĐT và ĐCĐ.
3.4. Chiến lược phối hợp nguồn động lực
Điều khiển chạy các chế độ mô phỏng trong AVL-Cruise được thực hiện thông qua Matlab/Simulink, vì vậy chương trình điều khiển chiến lược phối hợp nguồn động lực được viết trong Matlab.
Trên cơ sở điều kiện khai thác của phương tiện giao thông hiện nay, cụ thể như: Tốc độ tối đa, khả năng gia tốc, khả năng leo dốc, cho nên chiến lược phối hợp nguồn động lực HEV được thực hiện như trên Hình 3.4, trong đó:
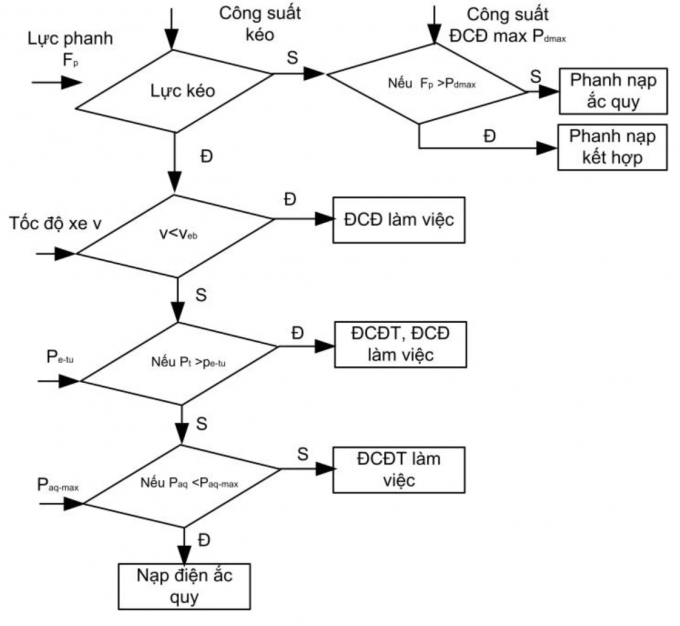 |
| Hình 3.4: Lưu đồ thuật toán điều khiển xe HEV |
- Chế độ ĐCĐ làm việc: Tốc độ xe thấp hơn giá trị được đặt trước Veb là tốc độ thấp mà động cơ không thể hoạt động ổn định được. Trong trường hợp này, ĐCĐ một mình phân phối công suất đến các bánh xe chủ động, trong khi động cơ không hoạt động hoặc chạy cầm chừng.
- Chế độ chạy kết hợp: Yêu cầu công suất tải lớn hơn công suất của ĐCĐT có thể phát ra, cả ĐCĐT và ĐCĐ đều phân phối công suất đến các bánh xe chủ động cùng lúc.
- Chế độ nạp ắc quy: Khi công suất tải yêu cầu thấp hơn công suất động cơ phát ra khi động cơ hoạt động trên đường hoạt động tối ưu pe-tu,. Trong trường hợp này, máy phát điện được điều khiển bởi bộ điều khiển làm cho nó hoạt động, nó được dẫn động từ phần công suất còn lại của động cơ.
- Chế độ ĐCĐT làm việc: Khi công suất tải yêu cầu thấp hơn công suất động cơ có thể phát ra khi nó hoạt động tối ưu và hệ thống nạp ắc quy không làm việc. Trong trường hợp này, hệ thống điện ngưng hoạt động và ĐCĐT hoạt động để cung cấp công suất đáp ứng công suất tải yêu cầu.
- Chế độ phanh nạp: Khi xe phanh và công suất phanh thấp hơn công suất phanh nạp cực đại, công suất mà hệ thống điện có thể cung cấp thì ĐCĐ được điều khiển có chức năng như một máy phát điện để cung cấp một công suất phanh bằng với công suất phanh yêu cầu.
 |
| Hình 3.5: Điều khiển HEV trong Matlab/Simulink |
- Chế độ phanh kết hợp: Khi công suất phanh yêu cầu lớn hơn công suất phanh nạp cực đại, công suất mà hệ thống điện có thể cung cấp thì phanh cơ khí phải được hoạt động. Trong trường hợp này, mô-tơ điện sẽ được điều khiển để cung cấp công suất phanh nạp cực đại và hệ thống phanh cơ khí sẽ giải quyết phần còn lại.
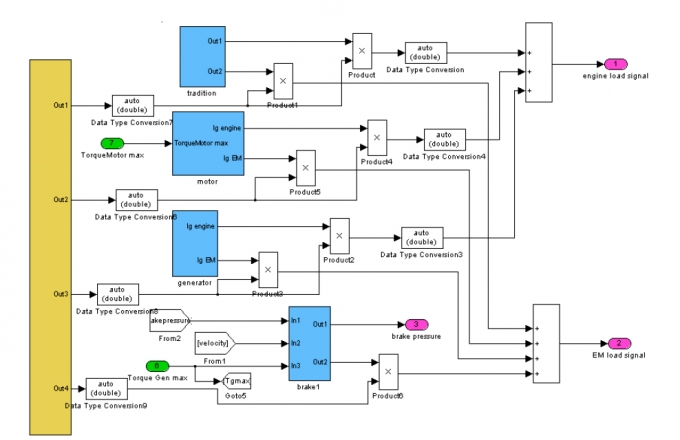
Để thực hiện chạy mô phỏng mô hình theo các chiến lược điều khiển nguồn động lực HEV song song trong phần mềm AVL-Cruise, cần phải được thực hiện thông qua Matlab/Simulink. Do vậy, chương trình điều khiển theo chiến lược của Hình 3.4 được viết trong Matlab/Simulink [7] như thể hiện ở Hình 3.5.
3.5. Kết quả
Sau khi chạy mô hình mô phỏng xe HEV kiểu song song theo chương trình thử FTP75 ta có được kết quả như sau:
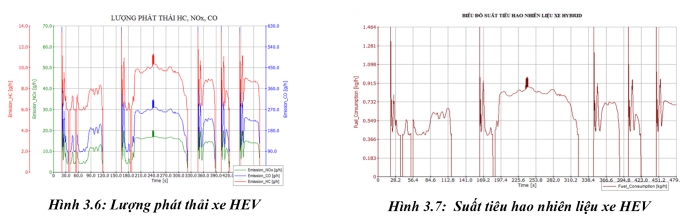
- Phát thải bao gồm (CO, HC, Nox…) của xe theo chu trình thử được thể hiện trên Hình 3.6. Kết quả cho thấy khí thải CO, HC, NOx, là giảm so với xe truyền thống lần lượt là: 63,67% với CO; 48% HC và 72,8% với Nox.
- Tiêu hao nhiên liệu được thể hiện trên Hình 3.7. Kết quả cho xe HEV là 1,62 l/km so với xe thông thường 3,74 l/km.
-
 |
Kết quả so sánh tính năng kinh tế và phát thải theo chu trình thử FTP 75 giữa xe HEV và xe thông thường được thể hiện thông qua Bảng 3.1 và Bảng 3.2.
4. Kết luận
Đã xây dựng thành công mô hình HEV bằng phần mềm AVL-Cruise và thực hiện chạy mô phỏng theo chu trình thử FTP 75. Kết quả cho thấy, lượng phát thải giảm so với xe thông thường lần lượt là 56,5% với CO2, 72,8% với NOx, 63,67% với CO và 48% HC và xe hybrid không tiêu tốn nhiên liệu vào quá trình không tải của xe. Các kết quả trên là cơ sở nghiên cứu quan trọng và hữu ích có thể sử dụng để hỗ trợ trong giai đoạn đầu quá trình thiết kế và phát triển xe hybrid ở Việt Nam.
Tài liệu tham khảo
[1]. M.Mehrdad Ehsani, Yimin Gao, Sebastien E.Gay, Ali Emadi (2005), Modern electric, Hybrid electric, and Fuel cell vehicles.
[2]. Khổng Vũ Quảng, Trần Văn Đăng, Trần Đăng Quốc,Trương Việt Anh (2014), Nghiên cứu phát triển hệ thống phối hợp nguồn động lực cho xe hybrid, Tạp chí Khoa học và Công nghệ, Trường Đại học Công nghiệp Hà Nội.
[3]. AVL CRUISE v.2013, Technical Documentation.
[4]. P. Srinivasan, U. M. Kothalikar (June 2009), Performance Fuel Economy and CO2 Prediction of a Vehicle using AVL Cruise Simulation Techniques, Powertrains, Fuels and Lubricants Meeting, Florence, Itay, SAE Paper no 2009-01-1862.
[5]. FarhadSangtarash,Vahid Esfahanian,HassanNehzati, Samaneh Haddadi, Meisam Amiri Bavanpour and Babak Haghpanah (2008),EffectofDifferentRegenerativeBrakingStrategies onBrakingPerformanceand FuelEconomy inaHybridElectric BusEmployingCRUISE VehicleSimulation, World Congress,April 14-17,pp:830-831.
[6]. http://www.avl.com, Advanced Simulation Technologies, Products.
[7]. http://edu.levitas.net/Tutorials/Matlab.
1. ĐẶT VẤN ĐỀNhững năm gần đây, tình trạng ô nhiễm không khí đã trở nên ngày càng nghiêm trọng. Để bảo vệ môi trường và nâng cao chất lượng không khí tại các thành phố lớn, chính phủ các nước đã đưa ra các quy định ngặt nghèo về tiêu thụ nhiên liệu và khí thải của xe. Đây là nguồn động lực chính thúc đẩy các hãng xản xuất ô tô đầu tư phát triển các công nghệ mới, thân thiện với môi trường cho các dòng sản phẩm của mình, trong đó phải kể đến xe điện (EV) và xe điện hybrid (HEV) [1, 2]. Với ưu điểm vượt trội về đặc tính kéo, hiệu suất và không gây ô nhiễm môi trường trong thành phố của xe EV so với xe sử dụng động cơ đốt trong (ĐCĐT) truyền thống, xe EV có thể được coi là hướng phát triển có nhiều triển vọng. Tuy nhiên, do khả năng lưu trữ năng lượng trong ắc quy còn thấp, thời gian mỗi lần sạc kéo dài, tuổi thọ sử dụng ngắn, tự trọng lớn và giá thành cao đã làm hạn chế phạm vi khai thác của xe EV [1]. Do vậy, xe HEV sử dụng phối hợp hai nguồn động lực, gồm động cơ điện (ĐCĐ) và ĐCĐT được cho là giải pháp hợp lý hiện nay, vì cho phép phát huy ưu điểm của ĐCĐ và ĐCĐT, cũng như khắc phục được các nhược điểm của chúng. Cùng xu hướng phát triển của thế giới, hiện nay dòng xe HEV đã xuất hiện nhiều ở Việt Nam. Do xe HEV có công nghệ phức tạp cả về kết cấu và hệ điều khiển, nên đã làm ảnh hưởng không nhỏ đến hiệu quả khai thác, sử dụng, bảo dưỡng và sửa chữa, thậm chí cả công tác quản lý của Nhà nước về các dòng xe này ở Việt Nam. Hơn nữa, đây là công nghệ mới, vẫn còn là bí mật của các hãng, nên việc tiếp cận công nghệ này cũng gặp rất nhiều khó khăn. Chính vì vậy, nghiên cứu thiết kế chế tạo để làm chủ công nghệ xe HEV cũng như định hướng sản xuất xe HEV ở Việt Nam là cần thiết và có tính thời sự. Để giải quyết một phần các vấn đề nêu trên, bài báo sẽ tập trung nghiên cứu thiết kế tính toán hệ động lực và chiến lược điều khiển trên xe HEV kiểu song song bằng phần mềm AVL-Cruise. Kết quả nghiên cứu của bài báo có thể được coi là cơ sở quan trọng bước đầu cho việc nghiên cứu thiết kế tính toán và chế tạo xe HEV tại Việt Nam.2. Các dẠng kẾt hỢp nguỒn đỘng lỰc trên xe HEVXe HEV sẽ được trang bị một ĐCĐT truyền thống, một bình chứa nhiên liệu, ắc quy, một hay nhiều ĐCĐ và máy phát điện (MPĐ). Tuy nhiên, xe HEV được phân thành 3 loại kết hợp nguồn động lực, gồm: HEV nối tiếp, HEV song song và HEV kết hợp [1, 2].- Kết hợp nguồn động lực HEV nối tiếpĐối với HEV nối tiếp ĐCĐT hoạt động truyền chuyển động kéo cho MPĐ làm việc để phát điện. Dòng điện được sinh ra chia làm hai phần, một để sạc ắc quy và một sẽ cấp năng lượng cho ĐCĐ. Động cơ điện truyền lực đến các bánh xe chủ động.- Kết hợp nguồn động lực HEV song songHEV song song cho phép cả hai ĐCĐ và ĐCĐT cùng cung cấp năng lượng song song tới cầu xe, trong đó ĐCĐT cung cấp năng lượng cơ học đến các bánh xe giống như các xe ĐCĐT truyền thống. HEV được hỗ trợ bởi một motor điện, nó được nối với hệ thống truyền lực qua khớp cơ khí. Do đó, tốc độ quay của ĐCĐT phụ thuộc vào quãng đường xe chạy, vì vậy ĐCĐT có thể hoạt động dựa trên miền làm việc tối ưu và nạp điện cho ắc quy. - Kết hợp nguồn động lực HEV kết hợpHEV kết hợp cho phép cả hai ĐCĐ và ĐCĐT cùng cung cấp năng lượng song song tới cầu xe, trong đó, ĐCĐT, ĐCĐ cung cấp năng lượng đến các bánh xe thông qua sự điều khiển đóng ngắt của khớp nối. MPĐ được ĐCĐT truyền chuyển động để nạp điện và cung cấp điện cho ĐCĐ thông qua khớp nối điều khiển. Mặc dù sự phức tạp của cấu trúc dẫn đến công nghệ sản xuất tốn kém hơn nhưng HEV kết hợp lại linh hoạt hơn trong việc kiểm soát. Một số HEV hiện đại thích áp dụng hệ thống này.Để xây dựng quy trình tính toán thiết kế xe HEV cũng như làm chủ công nghệ xe HEV, việc nghiên cứu tính toán hệ động lực HEV kiểu song song được coi là bước ban đầu. Vì vậy, bài báo sẽ tập trung nghiên cứu mô phỏng hệ động lực HEV kiểu song song bằng phần mềm AVL-Cruise.3. MÔ PHỎNG HỆ PHỐI HỢP NGUỒN ĐỘNG LỰC XE HEV BẰNG PHẦN MỀM AVL-Cruise3.1. Phần mềm AVL-CruisePhần mềm AVL-Cruise được sử dụng chủ yếu cho việc tính toán và tối ưu như: Tiêu thụ nhiên liệu và khí thải, khả năng vận hành; tính toán tỉ số truyền, hiệu suất phanh, tải trọng tập trung khi tính toán ứng suất, rung động gây ra. Các mô-đun của phần mềm AVL- Cruise cho phép có thể mô phỏng tất cả các mẫu xe hiện tại và tương lai. Hơn nữa, phần mềm AVL-Cruise có thể kết hợp để nghiên cứu khả năng vận hành, mức tiêu thụ nhiên liệu và khí thải của xe trong các điều kiện khác nhau như: Tăng tốc, tốc độ tối đa, khả năng leo dốc [3]...Các tính năng chính của phần mềm AVL-Cruise thể hiện cụ thể như: Phần mềm có thể dùng xây dựng mô hình các hệ thống truyền lực phức tạp, kết hợp sử dụng các mô hình với mô-đun khác nhau, xác định được mức tiêu thụ nhiên liệu xe, khả năng leo dốc, lực kéo, gia tốc, tốc độ, tăng tốc giảm tốc, lực phanh và có thể nhanh chóng xây dựng một chiếc xe điện thuần túy hoặc các mô hình xe hybrid và thông qua MATLAB, thiết kế được chiến lược xe, thuận tiện cho các chế độ truyền tải (AT, AMT, DCT, CTV...). Đồng thời, mô phỏng hệ thống xe theo thời gian thực, mô phỏng theo yêu cầu, hệ thống truyền động, ECU và có thể tìm và phát hiện lỗi giúp nâng cao hiệu quả quá trình mô phỏng [4].3.2. Nguồn động lực cho xe HEVTừ mục tiêu xây dựng HEV có công suất Ne=10kW, trong đó ĐCĐT có Ne= 6,5kW, ĐCĐ có Ne= 4kW cụ thể như sau [2]:ĐCĐT được sử dụng là động cơ một xi-lanh sử dụng xăng làm nhiên liệu, tốc độ tối đa là 7.000 vòng/phút và mô-men xoắn là 12Nm, Ne = 8,5kW, chế độ chạy trong HEV tối ưu là: Tốc độ tối đa là 5.000 vòng/phút và mô-men xoắn là 12Nm, Ne = 6,5kW.ĐCĐ một chiều không có chổi than có công suất định mức 4kW, tốc độ tối đa 6.000 vòng/phút, hiệu điện thế sử dụng 48V.3.3. Mô hình mô phỏng nguồn động lực cho xe HEVTrên cơ sở hệ động lực hybrid kiểu song song thể hiện trên Hình 3.1, trong đó gồm các nguồn động lực và các thành phần sau: ĐCĐT, ĐCĐ, bộ điều khiển ĐCĐ và ĐCĐT và khớp nối mô-men [5]. Nhóm nghiên cứu đã xây dựng mô hình mô phỏng nguồn động lực hybrid kiểu song song trên phần mềm AVL-Cruise như thể hiện trên Hình 3.2. Để đánh gia so sánh ưu việt của hệ hybrid kiểu song song và hệ động lực xe thông thường, nhóm nghiên cứu cũng thực hiện xây dựng mô hình xe thông thường bằng phần mềm AVL-Cruise như thể hiện trên Hình 3.3.Xe HEV được sản xuất bằng cách thêm vào một tập hợp các hệ thống điện trên cơ sở của xe thông thường. Khi ĐCĐ làm việc giúp nâng cao hiệu suất năng lượng của chiếc xe và làm giảm được sự tiêu thụ nhiên liệu của ĐCĐT. Xe HEV bao gồm ắc quy, ĐCĐ, một bộ điều khiển trung tâm và ĐCĐT [5,6]. Hình 3.2 cho thấy, các thành phần ắc quy hỗ trợ các điện áp yêu cầu của ĐCĐ. Bộ ghép mô-men xoắn là một quả lê bánh răng tỷ lệ duy nhất. Các thành phần Matlab là một giao diện của Matlab/Simulink để tích hợp ĐCĐT và ĐCĐ.3.4. Chiến lược phối hợp nguồn động lựcĐiều khiển chạy các chế độ mô phỏng trong AVL-Cruise được thực hiện thông qua Matlab/Simulink, vì vậy chương trình điều khiển chiến lược phối hợp nguồn động lực được viết trong Matlab.Trên cơ sở điều kiện khai thác của phương tiện giao thông hiện nay, cụ thể như: Tốc độ tối đa, khả năng gia tốc, khả năng leo dốc, cho nên chiến lược phối hợp nguồn động lực HEV được thực hiện như trên Hình 3.4, trong đó: Hình 3.4: Lưu đồ thuật toán điều khiển xe HEV- Chế độ ĐCĐ làm việc: Tốc độ xe thấp hơn giá trị được đặt trước Veb là tốc độ thấp mà động cơ không thể hoạt động ổn định được. Trong trường hợp này, ĐCĐ một mình phân phối công suất đến các bánh xe chủ động, trong khi động cơ không hoạt động hoặc chạy cầm chừng. - Chế độ chạy kết hợp: Yêu cầu công suất tải lớn hơn công suất của ĐCĐT có thể phát ra, cả ĐCĐT và ĐCĐ đều phân phối công suất đến các bánh xe chủ động cùng lúc.- Chế độ nạp ắc quy: Khi công suất tải yêu cầu thấp hơn công suất động cơ phát ra khi động cơ hoạt động trên đường hoạt động tối ưu pe-tu,. Trong trường hợp này, máy phát điện được điều khiển bởi bộ điều khiển làm cho nó hoạt động, nó được dẫn động từ phần công suất còn lại của động cơ.- Chế độ ĐCĐT làm việc: Khi công suất tải yêu cầu thấp hơn công suất động cơ có thể phát ra khi nó hoạt động tối ưu và hệ thống nạp ắc quy không làm việc. Trong trường hợp này, hệ thống điện ngưng hoạt động và ĐCĐT hoạt động để cung cấp công suất đáp ứng công suất tải yêu cầu. - Chế độ phanh nạp: Khi xe phanh và công suất phanh thấp hơn công suất phanh nạp cực đại, công suất mà hệ thống điện có thể cung cấp thì ĐCĐ được điều khiển có chức năng như một máy phát điện để cung cấp một công suất phanh bằng với công suất phanh yêu cầu. Hình 3.5: Điều khiển HEV trong Matlab/Simulink- Chế độ phanh kết hợp: Khi công suất phanh yêu cầu lớn hơn công suất phanh nạp cực đại, công suất mà hệ thống điện có thể cung cấp thì phanh cơ khí phải được hoạt động. Trong trường hợp này, mô-tơ điện sẽ được điều khiển để cung cấp công suất phanh nạp cực đại và hệ thống phanh cơ khí sẽ giải quyết phần còn lại.Để thực hiện chạy mô phỏng mô hình theo các chiến lược điều khiển nguồn động lực HEV song song trong phần mềm AVL-Cruise, cần phải được thực hiện thông qua Matlab/Simulink. Do vậy, chương trình điều khiển theo chiến lược của Hình 3.4 được viết trong Matlab/Simulink [7] như thể hiện ở Hình 3.5.3.5. Kết quảSau khi chạy mô hình mô phỏng xe HEV kiểu song song theo chương trình thử FTP75 ta có được kết quả như sau:- Phát thải bao gồm (CO, HC, Nox…) của xe theo chu trình thử được thể hiện trên Hình 3.6. Kết quả cho thấy khí thải CO, HC, NOx, là giảm so với xe truyền thống lần lượt là: 63,67% với CO; 48% HC và 72,8% với Nox.- Tiêu hao nhiên liệu được thể hiện trên Hình 3.7. Kết quả cho xe HEV là 1,62 l/km so với xe thông thường 3,74 l/km.- Kết quả so sánh tính năng kinh tế và phát thải theo chu trình thử FTP 75 giữa xe HEV và xe thông thường được thể hiện thông qua Bảng 3.1 và Bảng 3.2.4. KẾT LUẬNĐã xây dựng thành công mô hình HEV bằng phần mềm AVL-Cruise và thực hiện chạy mô phỏng theo chu trình thử FTP 75. Kết quả cho thấy, lượng phát thải giảm so với xe thông thường lần lượt là 56,5% với CO2, 72,8% với NOx, 63,67% với CO và 48% HC và xe hybrid không tiêu tốn nhiên liệu vào quá trình không tải của xe. Các kết quả trên là cơ sở nghiên cứu quan trọng và hữu ích có thể sử dụng để hỗ trợ trong giai đoạn đầu quá trình thiết kế và phát triển xe hybrid ở Việt Nam.
Tài liệu tham khảo[1]. M. Mehrdad Ehsani, Yimin Gao, Sebastien E.Gay, Ali Emadi (2005), Modern electric, Hybrid electric, and Fuel cell vehicles.[2]. Khổng Vũ Quảng, Trần Văn Đăng, Trần Đăng Quốc, Trương Việt Anh (2014), Nghiên cứu phát triển hệ thống phối hợp nguồn động lực cho xe hybrid, Tạp chí Khoa học và Công nghệ, Trường Đại học Công nghiệp Hà Nội.[3]. AVL CRUISE v.2013, Technical Documentation.[4]. P. Srinivasan, U. M. Kothalikar (June 2009), Performance Fuel Economy and CO2 Prediction of a Vehicle using AVL Cruise Simulation Techniques, Powertrains, Fuels and Lubricants Meeting, Florence, Itay, SAE Paper no 2009-01-1862.[5]. Farhad Sangtarash, Vahid Esfahanian, Hassan Nehzati, Samaneh Haddadi, Meisam Amiri Bavanpour and Babak Haghpanah (2008), Effect of Different Regenerative Braking Strategies on Braking Performance and Fuel Economy in a Hybrid Electric Bus Employing CRUISE Vehicle Simulation, World Congress, April 14-17, pp:830-831.[6]. http://www.avl.com, Advanced Simulation Technologies, Products. [7]. http://edu.levitas.net/Tutorials/Matlab.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.