Liên hệ quảng cáo
Nghiên cứu và thiết kế bộ điều khiển bám tín hiệu mô phỏng hàng hải của tổ hợp Drive/Servo ứng dụng PLC
Trong đào tạo thuyền viên, hệ thống mô phỏng hàng hải được sử dụng rộng rãi nhằm hiểu được sự tương tác giữa thuyền viên và con tàu
PGS. TS. ĐINH ANH TUẤN; ThS. TRƯƠNG CÔNG MỸ
Trường Đại học Hàng hải Việt Nam
 |
|
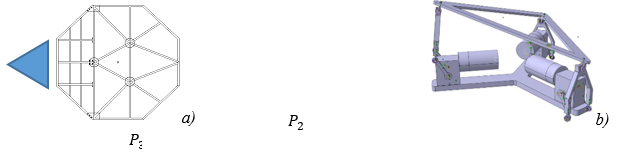
Mô hình mô phỏng chuyển động 3 bậc tự do: a) - Mặt sàn để gắn ca-bin buồng lái, b) - Giá đỡ khung tam giác gồm 3 động cơ servo truyền động |
TÓM TẮT: Trong đào tạo thuyền viên, hệ thống mô phỏng hàng hải được sử dụng rộng rãi nhằm hiểu được sự tương tác giữa thuyền viên và con tàu, của hành vi người điều khiển tàu. Trong nghiên cứu này, sàn chuyển động của ca-bin lái đề xuất là kiểu trục song song, được truyền động bởi ba động servo. Từ đó, bài báo trình bày một bộ điều khiển dựa trên PLC và Drive nhằm tạo ra sự kết hợp động học phi tuyến của mô hình động học 3 bậc tự do Stewart trong thuật toán điều khiển Feedforward, bù mô-men tải và dự báo số để tăng độ trung thực và khả năng bám của tín hiệu mô phỏng hàng hải. Các mô phỏng đã được thực hiện đầy đủ, chỉ số chất lượng bám cũng được xác định để so sánh một cách khách quan kết quả của các thuật toán khác nhau được đề xuất. Dữ liệu thu được cho thấy chất lượng bám tham chiếu tốt hơn với sai số góc quay lắc ngang và dọc thấp hơn, Cuối cùng, tác dụng bộ điều khiển bám dựa trên PLC cũng làm cho các chuyển động của bộ truyền động servo mượt mà hơn.
TỪ KHÓA: Hệ thống điều khiển nối tầng, điều khiển vị trí, mô phỏng hàng hải.
ABSTRACT: In crew training, marine simulator systems are widely used for understanding sailor-ship interaction, sailor behavior. In this research, the motion platform deck of cabine proposed the parallel manipulator is moved by three servo drives. This paper presents a controller-based PLC and Drive which incorporates the nonlinear kinematics of the 3DOF Stewart motion platform within the Feedforward control, load torque compensation and digital predict algorithm in order to increase the cueing fidelity and tracking capabilities of marine simulator signal. Full simulations were carried out, tracking performance indicators were defined to objectively compare the result of the proposed different algorithm. It is concluded that a better reference tracking with lower roll, pitch angle error. Lastly, the effect of the tracking controller-based PLC was also observed in the form of smoother servo-actuator movements.
KEYWORDS: Cascade control system, position control, marine simulation.
Nội dung xem tại đây
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.