Liên hệ quảng cáo
Thiết kế bộ điều khiển mờ lai cho robot tự hành bám quĩ đạo với hai bánh chủ động điều khiển độc lập
Bài báo trình bày về bộ điều khiển thông minh cho robot tự hành bám quỹ đạo với hai bánh chủ động điều khiển độc lập
TS.ĐỖ KHẮC TIỆP
Trường Đại học Hàng hải Việt Nam
 |
|
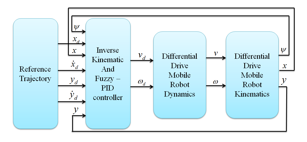
Cấu trúc của bộ điều khiển cho robot tự hành với hai bánh chủ động điều khiển độc lập |
TÓM TẮT: Bài báo trình bày về bộ điều khiển thông minh cho robot tự hành bám quỹ đạo với hai bánh chủ động điều khiển độc lập. Bộ điều khiển được sử dụng trong nghiên cứu là bộ điều khiển mờ lai (Fuzzy - PID) với hai đầu vào và một đầu ra. Khi trong hệ thống xuất hiện sai số (robot lệch khỏi quĩ đạo đặt) bộ điều khiển mờ (Fuzzy controller) sẽ tự động điều chỉnh các thông số của bộ điều khiển PID để cho robot nhanh chóng hành trình đúng quĩ đạo với sai lệch là nhỏ nhất. Mô hình toán học của robot với hai bánh độc lập được xây dựng dựa trên mô hình động Lagrange. Kết quả thực hiện bám quĩ đạo của robot mô phỏng trên Matlab/Simulink bằng cả hai bộ điều khiển PID truyền thống và bộ điều khiển Fuzzy - PID được sử dụng để kiểm tra, phân tích và so sánh với nhau. Từ kết quả nghiên cứu cho thấy, cả hai bộ điều khiển PID và Fuzzy - PID đều có thể thực hiện được việc điều khiển bám quĩ đạo của robot, tuy nhiên bộ điều khiển mờ lai Fuzzy - PID thực hiện việc điều khiển nhanh chóng và chính xác hơn. Bộ điều khiển Fuzzy - PID có ưu điểm là phản hồi nhanh, độ ổn định và độ chính xác cao, chống nhiễu tốt hơn so với bộ điều khiển PID truyền thống. Do đó, việc lựa chọn bộ điều khiển Fuzzy - PID là lựa chọn thích hợp cho điều khiển robot tự hành bám quĩ đạo với hai bánh chủ động điều khiển độc lập.
TỪ KHÓA: Robot di động, PID controller, Fuzzy logic controller, Trajectory tracking, Matlab/Simulink.
ABSTRACT: In this paper, a design of a fuzzy-PID controller for path tracking of a mobile robot with differential drive is proposed. The Fuzzy - PID controller consists of PID controller and a fuzzy controller with two inputs and three outputs. When the system appears the error and the error rate, the fuzzy controller will tune the parameters of the PID controller. The model of a mobile robot based with differential drive based on Lagrange dynamic approach is described. The Fuzzy - PID controller and the classical PID controller are compared by the simulation. The path tracking of a differential drive mobile robot with differential drive was tested using Matlab/Simulink. The simulation results show that the Fuzzy - PID controller has a better performance than the classical PID controller. The proposed controller has better convergence rate in comparison with the classical PID controller for a mobile robot with any arbitrary initial state. It has the advantages of rapid respond, high stability, tracking accuracy and good anti-interference, so the Fuzzy - PID controller is the appropriate choice for trajectory tracking control of mobile robots with differential drive.
KEYWORDS: Mobile robot, PID controller, Fuzzy logic controller, Trajectory tracking, Matlab/Simulink.
Nội dung xem tại đây
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.