Liên hệ quảng cáo
Thiết kế hệ thống scada các bộ khởi động động cơ điện xoay chiều 3 pha
Bài báo trình bày về thiết kế hệ thống điều khiển và giám sát từ xa các động cơ điện xoay chiều 3 pha ứng dụng công nghệ mạng RS485.
|
TS. NGUYỄN KHẮC KHIÊM Trường Đại học Hàng hải Việt Nam |
TÓM TẮT: Bài báo trình bày về thiết kế hệ thống điều khiển và giám sát từ xa các động cơ điện xoay chiều 3 pha ứng dụng công nghệ mạng RS485. Trong đó, công nghệ mạng phân tán được sử dụng, kết hợp thiết kế phần mềm giao diện trên máy tính bằng Visual C# kết hợp lập trình để điều khiển và giám sát từ xa các động cơ điện xoay chiều 3 pha. Ưu điểm của giải pháp là làm tăng tuổi thọ của thiết bị, nâng cao được hiệu quả làm việc của hệ thống, giảm chi phí sản xuất, đồng thời giúp cải thiện điều kiện làm việc trong vận hành và bảo dưỡng thiết bị... Khả năng áp dụng của giải pháp vào thực tế được kiểm chứng qua thực nghiệm điều khiển và giám sát từ xa các động cơ.
TỪ KHÓA: Động cơ điện xoay chiều 3 pha, hệ thống điều khiển giám sát từ xa.
ABSTRACT: This article proposes the design of controlling and remote monitoring system for 3 phases motors using RS485 connection. Inwhich, distributed network technology is used in combination with an interface software using Visual C#. They are programmed to control and monitor remotely 3 phases motors. The advantages of this method are the longevity of equipment, the efficiency of system, the reduction of production’s cost and also the improvement of the state of working during operating and maintaining periods... The practical applicability of this method could be easily verified by operating and remote monitoring experiment.
Keywords: Three phases alternative motor, remote operation and monitor.
1. ĐẶT VẤN ĐỀ
Bước vào cuộc cách mạng công nghiệp 4.0, ngành tự động hóa tại Việt Nam phát triển khá mạnh mẽ. Trang thiết bị trên tàu thủy cũng như trên bờ ngày càng hiện đại đã nâng cao được hiệu quả khi khai thác, đồng thời giúp cải thiện điều kiện làm việc trong vận hành và bảo dưỡng thiết bị.
Việc điều khiển các trang thiết bị ngày một hiện đại, tối ưu hơn. Rất nhiều các thiết bị, đặc biệt là động cơ điện được lắp ráp cho tàu thủy, nhà máy, xí nghiệp góp phần tác động tích cực đến hiệu quả làm việc của hệ thống, chi phí sản xuất... Do đó, điều khiển và giám sát các động cơ điện là cần thiết và quan trọng, nó còn góp phần quyết định đến tuổi thọ của trang thiết bị.
Mặc dù đã có nhiều công trình nghiên cứu, tài liệu viết về phương pháp điều khiển động cơ điện không đồng bộ xoay chiều (ĐCĐKĐBXC) 3 pha [1,2,3,4], điều khiển phân tán [5,6], điều khiển và giám sát [7,8], song chưa có công trình, giải pháp nào nghiên cứu, đề xuất kết hợp ứng dụng điều khiển phân tán, xây dựng giao diện trên máy tính, lập trình, điều khiển giám sát từ xa các ĐCĐKĐBXC 3 pha nhằm nâng cao hiệu quả làm việc của hệ thống, giảm chi phí sản xuất, tăng tuổi thọ của trang thiết bị, thuận lợi trong công tác bảo dưỡng sửa chữa các hệ thống do thay đổi được phần mềm lập trình.
Xuất phát từ đòi hỏi cấp thiết trong thực tế đó, bài báo thực hiện nghiên cứu hệ thống điều khiển và giám sát từ xa các ĐCĐKĐBXC 3 pha ứng dụng công nghệ mạng phân tán. Bài báo tập trung nghiên cứu hệ thống điều khiển và giám sát từ xa ứng dụng công nghệ mạng phân tán, đề xuất sơ đồ cấu trúc, đặc tính và xây dựng mô hình vật lý, tiến hành thực nghiệm lập trình, điều khiển giám sát từ xa các ĐCĐKĐBXC 3 pha.
2. HỆ THỐNG ĐIỀU KHIỂN, GIÁM SÁT PHÂN TÁN VỚI VÀO/RA TẬP TRUNG
Một dây chuyền sản xuất thường được phân chia thành nhiều phân đoạn, có thể được phân bố tại nhiều vị trí cách xa nhau. Để khắc phục sự phụ thuộc vào một máy tính trung tâm trong cấu trúc tập trung và tăng tính linh hoạt của hệ thống, ta có thể điều khiển mỗi phân đoạn bằng một hoặc một số máy tính cục bộ (Hình 2.1).
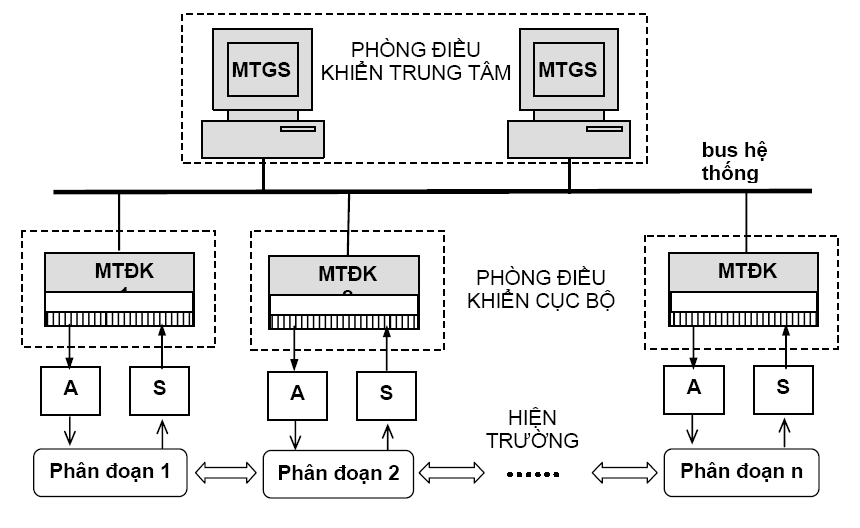 |
| Hình 2.1: Cấu trúc điều khiển phân tán với vào/ra tập trung |
Các phân đoạn có liên hệ tương tác với nhau, vì vậy để điều khiển quá trình tổng hợp cần có sự điều khiển phối hợp giữa các máy tính điều khiển. Trong phần lớn các trường hợp, các máy tính điều khiển được nối mạng với nhau và với một hoặc nhiều máy tính giám sát (MTGS) trung tâm qua bus hệ thống. Giải pháp này dẫn đến các hệ thống có cấu trúc điều khiển phân tán, hay được gọi là các hệ điều khiển phân tán (HĐKPT - DCS).
Việc phân tán chức năng xử lý thông tin và phối hợp điều khiển có sự giám sát từ các trạm vận hành trung tâm mở ra khả năng ứng dụng mới, tích hợp trọn vẹn trong hệ thống như lập trình cao cấp, điều khiển trình tự, điều khiển theo công thức và ghép nối với cấp điều hành sản xuất [6].
3. CÁC THÀNH PHẦN CỦA MỘT HỆ THỐNG ĐIỀU KHIỂN PHÂN TÁN
Cấu trúc cơ bản một hệ điều khiển phân tán minh họa trên Hình 3.1.
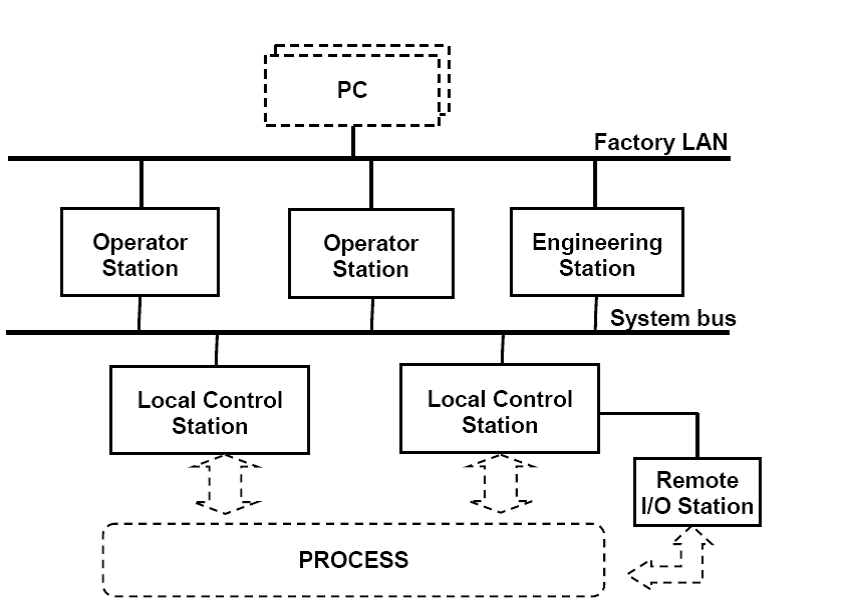 |
| Hình 3.1: Cấu trúc cơ bản một hệ điều khiển phân tán |
Các trạm điều khiển cục bộ (local control station, LCS) đôi khi còn được gọi là các khối điều khiển cục bộ hoặc các trạm quá trình.
Các trạm vận hành (operation station, OS).
Trạm kỹ thuật (engineering station, ES) và các công cụ phát triển.
Hệ thống truyền thông (field bus, system bus).
Đây là cấu hình tối thiểu, các cấu hình cụ thể có thể chứa các thành phần khác như trạm vào/ra từ xa, các bộ điều khiển chuyên dụng [6].
Hiện có một số phương pháp điều khiển từ xa động cơ điện, mỗi phương pháp đều có những nhược điểm nhất định: Dùng contactor và rơ-le (chỉ dùng cho động cơ công suất nhỏ; khi đóng cắt gây ra vấn đề về cơ và điện; mỗi mạch phải dùng một đường dây riêng biệt dẫn đến quá nhiều dây dẫn nên phức tạp, tốn kém, lãng phí và việc mở rộng hệ thống gặp khó khăn). Dùng biến tần (giá thành cao; nhiễu gây ra trong quá trình làm việc; điện áp không còn dạng hình sin; nếu khoảng cách nối dây giữa biến tần với động cơ đủ lớn sẽ xảy ra hiện tượng quá điện áp - do hiện tượng phản xạ sóng điện từ có thể dẫn đến lão hóa cách điện cuộn dây stator, giảm tuổi thọ thậm chí làm hỏng động cơ). Dùng khởi động mềm (khó khăn trong quá trình thi công và bảo trì bảo dưỡng; điện áp và dòng điện không sin hoàn toàn; không có khả năng điều khiển được tốc độ động cơ; giá thành tương đối cao).
Để khắc phục được các nhược điểm và tận dụng các ưu điểm của các hệ thống trên ta thiết kế hệ thống điều khiển, giám sát từ xa các động cơ điện ứng dụng công nghệ mạng phân tán nhằm đáp ứng được các chỉ tiêu về kỹ thuật cũng như chỉ tiêu về kinh tế. Hệ thống được đề xuất có các đặc điểm sau:
- Giữ nguyên mạch khởi động tại chỗ, cải thiện hệ thống;
- Ghép nối toàn bộ giao diện vào/ra phân tán để vừa điều khiển động cơ thông qua rơ-le, contactor vừa kết nối được với mạng;
- Ngoài ra, cải thiện đặc tính khởi động như phương án bộ khởi động kết hợp với khởi động mềm, biến tần cộng với mô-đun ghép nối.
4. NGHIÊN CỨU XÂY DỰNG HỆ THỐNG ĐIỀU KHIỂN, GIÁM SÁT TỪ XA CÁC ĐCĐKĐBXC 3 PHA
4.1. Cấu trúc hệ thống điều khiển giám sát từ xa
Hệ thống điều khiển, giám sát từ xa các động cơ điện ứng dụng công nghệ mạng phân tán được đề xuất như Hình 4.1, gồm: Máy tính điều khiển, bộ chuyển đổi USB/RS485, các mô-đun giao diện IM1 đến IMn (Interface Module), các hộp khởi động (Starter 1 đến Starter n), chúng trao đổi với nhau thông qua mạng Modbus/RS485.
Trong máy tính điều khiển PC có chứa phần mềm điều khiển và đã được thiết kế các form (form 1 là giao diện chính, form 2 là mô-đun điều khiển giám sát động cơ số 1, form 3 là mô-đun điều khiển giám sát động cơ số 2, form 4 là mô-đun điều khiển giám sát động cơ 3).
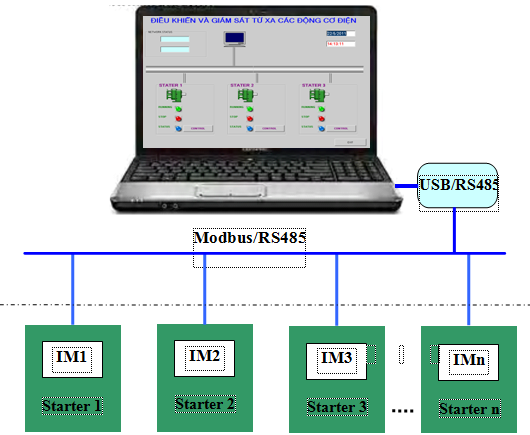 |
| Hình 4.1: Sơ đồ cấu trúc hệ thống điều khiển, giám sát từ xa các động cơ điện |
Trong các hộp khởi động (Starter) gồm có các phần cứng và mô-đun giao diện IM, các hộp này nằm phân tán gần các động cơ cần điều khiển giám sát. Từ máy tính có thể điều khiển, giám sát các động cơ điện thông qua các hộp khởi động được truyền qua mạng Modbus/RS485, và tín hiệu điều khiển được chuyển đổi từ USB sang RS485 bằng bộ USB/RS485.
4.2. Mô-đun khởi động, giám sát phân tán
Mô-đun điều khiển, giám sát phân tán là một thành phần quan trọng để điều khiển động cơ điện thông qua máy tính PC (Hình 4.2), bao gồm động cơ M được điều khiển quay thuận, quay ngược thông qua contactor M và contactor K. Động cơ này được điều khiển tại chỗ thông qua các nút khởi động (Start 1, Start 2), dừng (Stop) và điều khiển từ xa thông qua S1, S2, T0 trên PC. Để đo được dòng điện của động cơ thì ta lấy tín hiệu thông qua biến dòng rồi qua bộ biến đổi INV có giá trị từ 0 đến 5V để đưa đến giao diện IM.
Nguồn điện cấp cho động cơ là loại xoay chiều 380V, nguồn cấp cho mạch điều khiển là loại xoay chiều 220V và nguồn cấp cho giao diện IM là 24VDC đồng thời cũng cấp nguồn 24VDC cho rơ-le T0.
Giao diện IM có đầu tới PC để điều khiển từ xa thông qua RS485 và có đầu colector hở cấp nguồn cho rơ-le T0 để dừng động cơ từ xa trên PC.
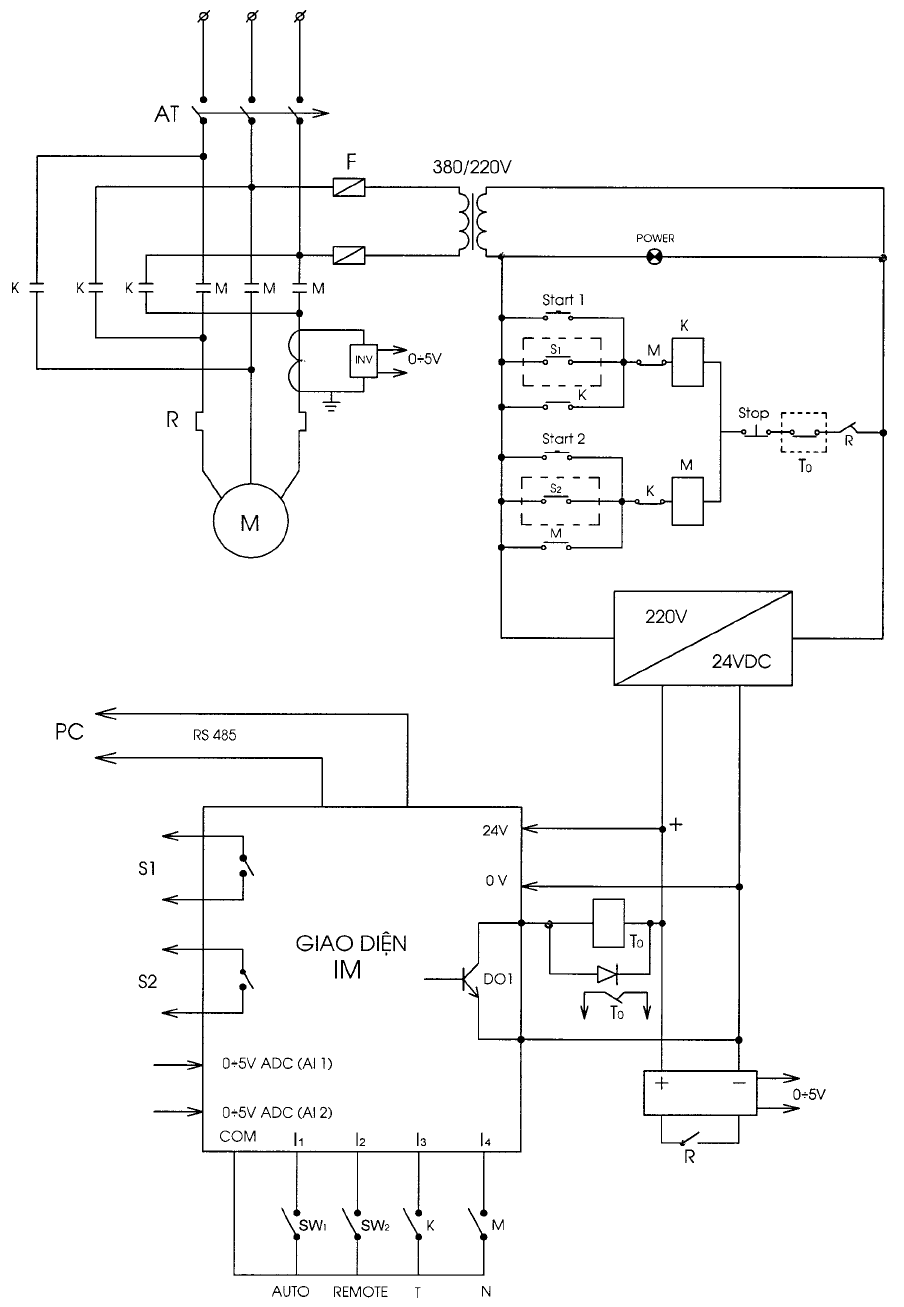 |
| Hình 4.2: Sơ đồ điều khiển, giám sát phân tán |
Trên giao diện IM còn có tiếp điểm dành cho chế độ tự động (AUTO) - bằng tay (MAN) là SW1, từ xa (REMOTE) - tại chỗ (LOCAL) là SW2, T là chế độ khởi động động cơ quay thuận (Forward); M là chế độ khởi động động cơ quay ngược (Resever). Khi không xảy ra quá tải R = 0 thì đầu ra của IM là AI2 = 0V, ngược lại nếu có quá tải thì đầu ra của IM là AI2 = 5V.
Cấu trúc phần cứng mô-đun điều khiển và giám sát từ xa như Hình 4.3, gồm: Chip ATmega16; mạch tạo dao động thạch anh Y1 với tụ C10 và C11; mạch cấp nguồn sử dụng IC LM2576/TO; mạch chỉ thị truyền nhận mạng với LED D54 và D55; mạch cách ly đầu vào số sử dụng các Transistor U7A TLP621- 4, U7B TLP621- 4, U7C TLP621- 4, U7D TLP621- 4 và các đèn LED phát quang; mạch giao diện nạp chương trình CON10A J12; mạch công suất cấp nguồn cho rơ-le sử dụng chíp ULN 2803 và các cầu nối J26, J27.
Phần cứng liên kết mạng gồm các thiết bị tớ từ Slave 1 đến Slave n là các mô-đun thu thập dữ liệu, còn thiết bị chủ (Master) là máy tính trung tâm.
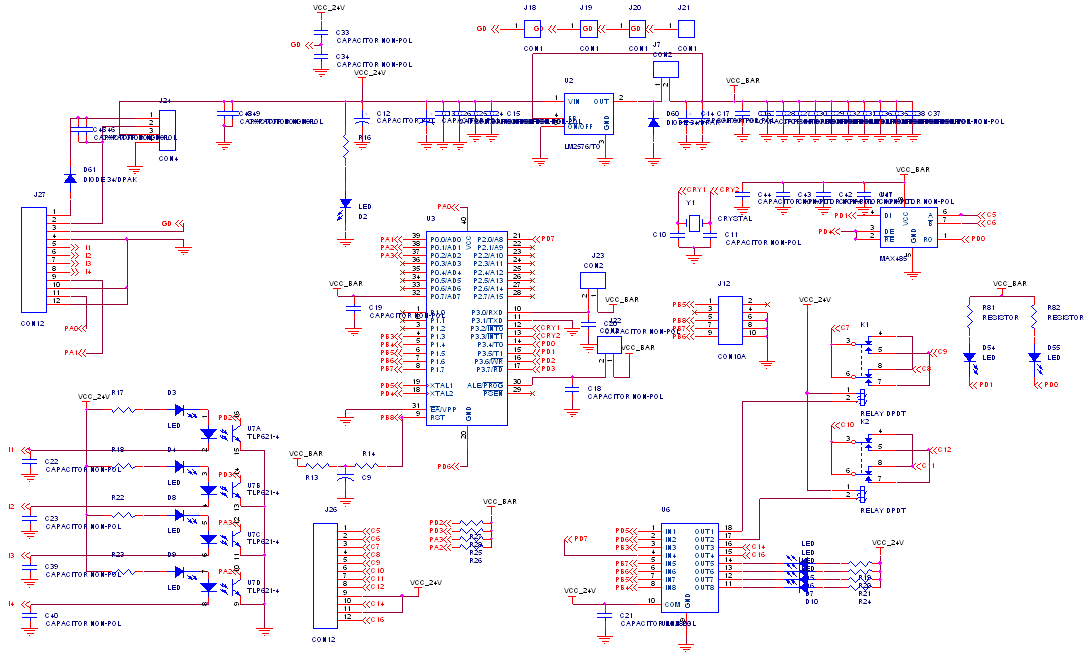 |
| Hình 4.3: Sơ đồ cấu trúc phần cứng mô-đun điều khiển và giám sát từ xa |
Các thiết bị này làm việc với nhau thông qua mạng RS485 (Hình 4.4).
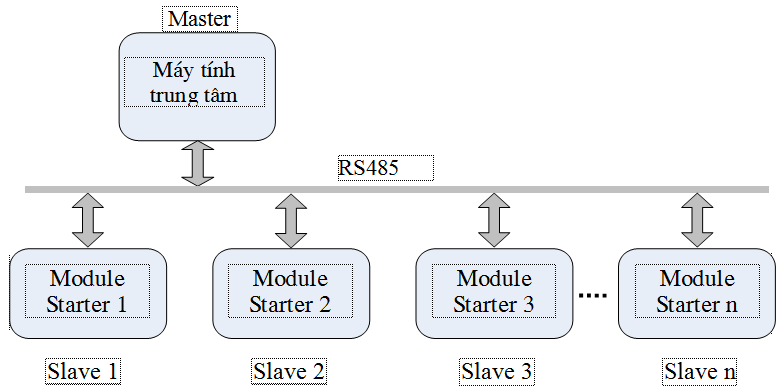 |
| Hình 4.4: Sơ đồ mạng RS485 |
Mạch giao diện mạng RS485 như Hình 4.5.
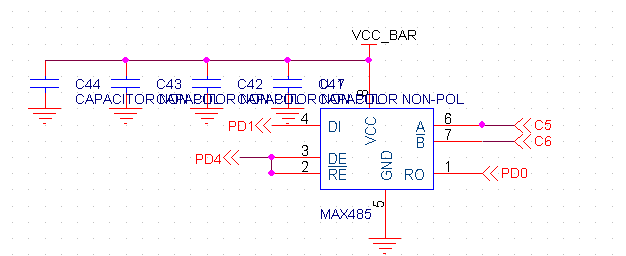 |
| Hình 4.5: Mạch giao diện mạng RS485 |
4.3. Xây dựng chương trình phần mềm điều khiển và giám sát từ xa
Thực hiện xây dựng chương trình phần mềm điều khiển chip ATmega16. Chip AVR này có thể coi là bộ “não” của mô-đun ghép thu thập dữ liệu. Nó điều khiển toàn bộ quá trình thu thập xử lí dữ liệu dạng tương tự, số, xử lý thông báo yêu cầu gửi tới từ thiết bị xử lý trung tâm (máy tính) và thành lập thông báo trả lời master [10].
Ngôn ngữ soạn thảo cho chip AVR này có thể là ASM (assemply) hoặc ngôn ngữ cấp cao C. Hiện nay, có nhiều trình biên dịch cho phép soạn thảo chương trình điều khiển cho chip AVR bằng ngôn ngữ C có thể kể như AVRStudio, CodeVisionAVR, WinAVR… Hầu hết các trình biên dịch này đều tích hợp sẵn chương trình nạp chip hỗ trợ nhiều loại mạch nạp. Trong quá trình thiết kế mô-đun này sử dụng phần mềm CodeVisionAVR để viết chương trình điều khiển cho chip. Sau khi xây dựng giao diện điều khiển và giám sát từ xa trên máy tính, thiết kế đồ họa chỉ thị số và tương tự ta được giao diện (Hình 4.6, 4.7...).
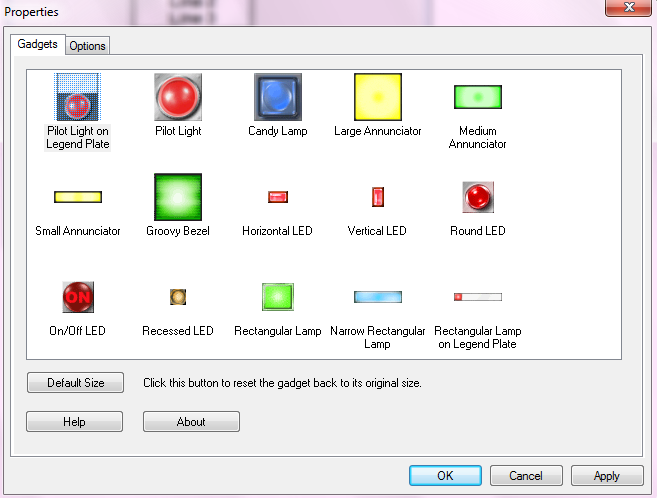 |
| Hình 4.6: Giao diện các kiểu đèn báo động |
5. GHÉP NỐI PHẦN CỨNG, PHẦN MỀM VÀ MÔ HÌNH THỰC NGHIỆM
Thực hiện ghép nối phần cứng và phần mềm ta được:
Form 1: Là Panel điều khiển chính để giám sát các động cơ điện, giám sát trạng thái của 3 động cơ điện, trạng thái mạng... (Hình 5.1).
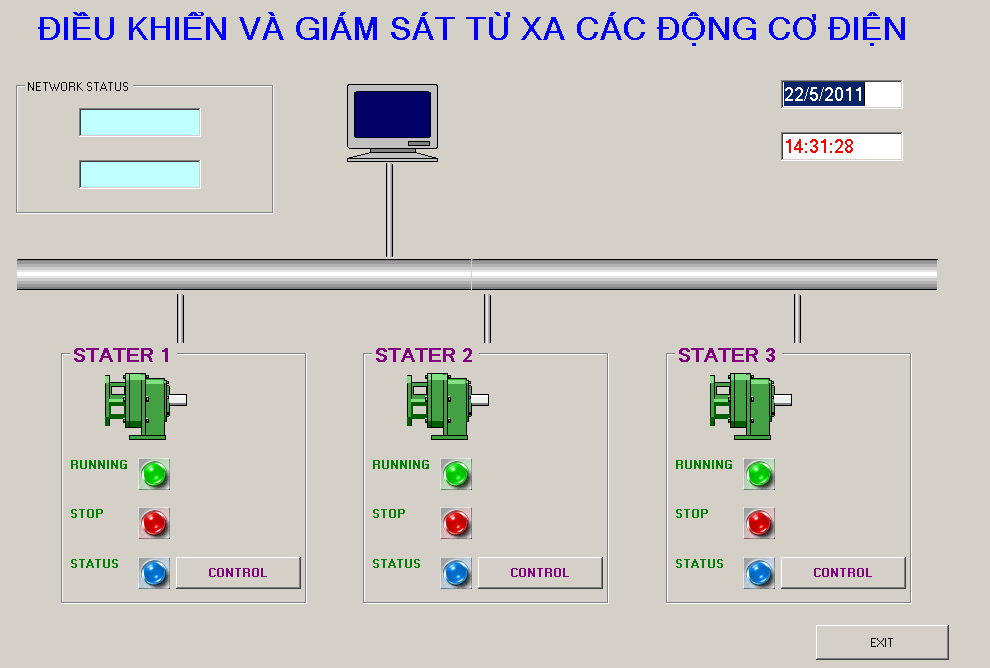 |
| Hình 5.1: Form 1 giao diện chính |
Form 2: Là Panel điều khiển động cơ điện số 1: Giám sát và điều khiển động cơ điện về dòng điện, quay thuận, quay ngược… (Hình 5.2).
 |
| Hình 5.2: Form 2 giao diện cho Starter 1 |
Form 3: Là Panel điều khiển động cơ điện số 2: Giám sát và điều khiển động cơ điện về dòng điện, quay thuận, quay ngược… (Hình 5.3).
 |
| Hình 5.3: Form 3 giao diện cho Starter 2, 3 |
Mô hình thực nghiệm thể hiện trên các Hình 5.4, 5.5, 5.6.
 |
| Hình 5.4: Hệ thống mô hình thực nghiệm |
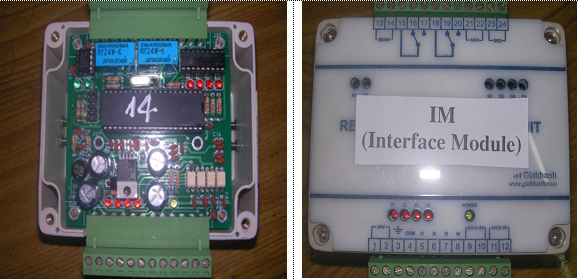 |
| Hình 5.5: Cấu tạo của mô-đun giao diện IM |
 |
| Hình 5.6: Bộ Starter 1, Starter 2 |
Nhận xét: Hệ thống điều khiển, giám sát từ xa các động cơ điện ứng dụng công nghệ mạng phân tán đã được thiết kế và đưa vào thử nghiệm cho kết quả rất tốt, thông qua các phương án thử nghiệm như sau:
Tiến hành khởi động và dừng từ máy tính cho từng bộ khởi động thông qua mô-đun giao diện với khoảng cách truyền 500m cho kết quả tốt.
Giám sát tín hiệu tương tự là giá trị dòng điện của các động cơ cho kết quả cập nhật nhanh, khả năng lọc nhiễu tốt.
Giám sát tín hiệu số bao gồm trạng thái vận hành của động cơ như chạy, dừng, chế độ từ xa - tại chỗ, tự động - bằng tay, trạng thái sự cố cũng cho độ chính xác cao và thời gian đáp ứng nhanh.
Kết quả thực nghiệm cho thấy, hệ thống đã đảm bảo tính thời gian thực trong điều khiển và khả năng chống nhiễu trên đường truyền mạng trong môi trường tàu thủy. Các kết quả thực nghiệm với tốc độ truyền là 38.400 bit/s và thời gian vòng quét của máy tính cho từng bộ khởi động là 500ms. Tuy nhiên, ta vẫn có thể giảm thời gian này xuống đến 50ms, khi đó tốc độ điều khiển và thu thập dữ liệu có thể tăng lên đến 10 lần.
6. KẾT LUẬN
Hệ thống điều khiển và giám sát từ xa các động cơ điện ứng dụng công nghệ mạng phân tán có nhiều ưu điểm: Làm tăng tuổi thọ của thiết bị, nâng cao được hiệu quả làm việc của hệ thống, giảm chi phí sản xuất, đồng thời giúp cải thiện điều kiện làm việc trong vận hành và bảo dưỡng thiết bị. Đồng thời có hệ thống mở, có thể lưu chương trình để gửi về công ty, xây dựng đặc tính cũng như tính toán thời gian bảo trì cho động cơ.
Thực nghiệm sử dụng họ vi điều khiển AVR với các đặc điểm nổi trội như dễ dàng thay đổi được các thông số điều khiển, thuật toán ngay cả khi chip Atmega32 đang làm việc. Xây dựng phần mềm điều khiển, giám sát từ xa ứng dụng phần mềm Microsoft Visual Studio 2015, ngôn ngữ hướng đối tượng, hiện đại, đơn giản, ít từ khóa. Kết quả thực nghiệm đã khẳng định hiệu quả của hệ thống điều khiển và giám sát từ xa các động cơ điện ứng dụng công nghệ mạng phân tán.
Tài liệu tham khảo
[1]. Nguyen Khac Khiem, Dinh Anh Tuan (01/2018), Improving quality of induction motor drives by using Direct-decoupling methodology based on exact linearization Algorithm and kalman filter, Journal of marine science and technology, No. 53, pp.8-14.
[2]. Shi V. Kailaswar, Prof.RA. Keswani (2013), Speed Control of Three Phase Induction Motor by V/f Method for Batching Motion System, International Journal of Engineering Research and Applications (IJERA), №3, pp.1732-1736.
[3]. G.C. Diyoke, Okeke C., Uchechi Aniagwu (2016), Different Methods of Speed Control of Three-Phase Asynchronous Motor, American Juornal of Electrical and Electronic Engineering, №2, pp.62-68.
[4]. Shilpa V. Kailaswar, R. A. Keswani (2013), Speed Control of Three Phase Induction Motor by V/f Method for Batching Motion System, International Journal of Engineering Research and Application (IJERA), №3, pp.1732-1736.
[5]. Caspi, P., Mazuet, C., Paligot, N.R (2001), About the Design of Distributed Control Systems: The Quasi-Synchronous Approach, SAFECOMP, pp.215-226.
[6]. Hoàng Minh Sơn (2003), Hệ thống điều khiển phân tán, Trường Đại học Bách khoa Hà Nội, 106 trang.
[7]. Monita N. Jadhav and G. R. Gidveer (2012), Internet based remote monitoring and control, International Journal of Advances in Engineering & Technology, №3, pp.542-548.
[8]. T.Soundarya, J.V. Anchitaalagammai (2014), Control and Monitoring System For Liquefied Petroleum Gas (LPG) Detection And, International Journal of Innovative Research in Science, Engineering and Technology, №3, pp.696-700.
[9]. Vũ Gia Hanh, Trần Khánh Hà, Phan Tử Thụ, Nguyễn Văn Sáu (2005), Máy điện, tập 1, NXB. Khoa học và Kỹ thuật, 336 trang.
[10]. Ngô Diên Tập (2003), Kỹ thuật vi điều khiển với AVR, NXB. Khoa học và Kỹ thuật, 474 trang.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.