Liên hệ quảng cáo
Thực nghiệm hiệu chỉnh độ lệch la bàn từ kỹ thuật số
Bài báo giới thiệu về việc hiệu chỉnh độ lệch của la bàn từ kỹ thuật số do ảnh hưởng của thân tàu bằng sắt.
|
ª TS. Nguyễn Công Vịnh Trường Đại học Hàng hải Việt Nam Người phản biện: TS. Nguyễn Minh Đức PGS. TS. Nguyễn Kim Phương |
Tóm tắt: Bài báo giới thiệu về việc hiệu chỉnh độ lệch của la bàn từ kỹ thuật số do ảnh hưởng của thân tàu bằng sắt. Việc thực nghiệm được thực hiện với một mô hình tàu bằng sắt tại phòng thực hành của Khoa Hàng hải - Trường Đại học Hàng hải Việt Nam.
Từ khóa: La bàn kỹ thuật số, lỗi chính xác, độ lệch.
Abstract: The paper introduces the experiments to correct the deviation of magnetic digital compasses due to the effect of the ship’s hull made of iron. The experiments have been carried out with an iron vessel model in the practice room of the Navigation Faculty.
Keywords: Digital compass, correct error, deviation.
1. Đặt vấn đề
La bàn từ kỹ thuật số cũng như la bàn từ truyền thống đều có chung một hạn chế phát sinh từ nguyên lý định hướng của chúng. Việc định hướng của các la bàn này dựa vào đường sức từ của trái đất tại nơi đặt la bàn nên hướng chỉ của của chúng bị ảnh hưởng của các yếu tố sau:
- Độ lệch địa từ, đường sức từ của trái đất ở các khu vực khác nhau có các hướng khác nhau và không hoàn toàn đi qua địa cực;
- Sự biến thiên của độ lệch địa từ theo thời gian;
- Từ trường thứ cấp tại nơi đặt la bàn (ví dụ các kết cấu bằng sắt thép của con tàu...).
Trong các yếu tố trên, yếu tố độ lệch và biến thiên độ lệch địa từ được nhiều tổ chức trên thế giới khảo sát và công bố nên người dùng có số liệu để chủ động hiệu chỉnh la bàn.
Yếu tố từ trường thứ cấp tại nơi đặt la bàn, cụ thể là từ trường thứ cấp của các kết cấu sắt thép trên mỗi con tàu đều khác nhau nên việc hiệu chỉnh phải thực hiện trên từng con tàu cụ thể. Bài viết này mô tả các thực nghiệm và kết quả đạt được của việc hiệu chỉnh la bàn từ kỹ thuật số với một con tàu mô hình làm bằng sắt trên phòng thực hành. Phương pháp thực nghiệm hoàn toàn giống như làm trên tàu thật nên việc triển khai mở rộng kết quả thực nghiệm này trong thực tiễn là khả thi.
2. Lý thuyết của phương pháp
Việc hiệu chỉnh la bàn từ dựa vào phương trình Passon [1] như sau:
(1)
 |
 |
 |
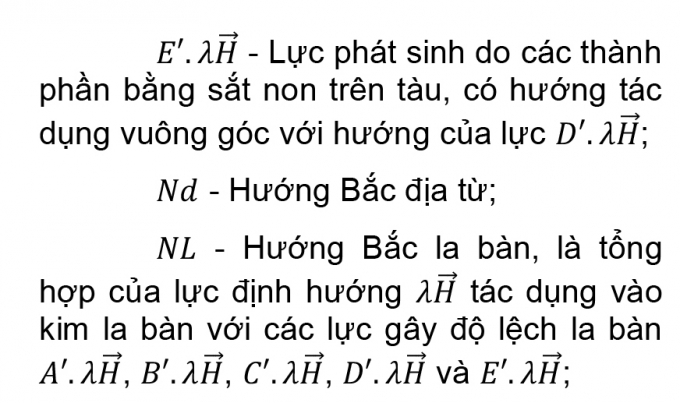
| Hình 2.1: Các lực tác động lên kim la bàn từ trên tàu |
 |
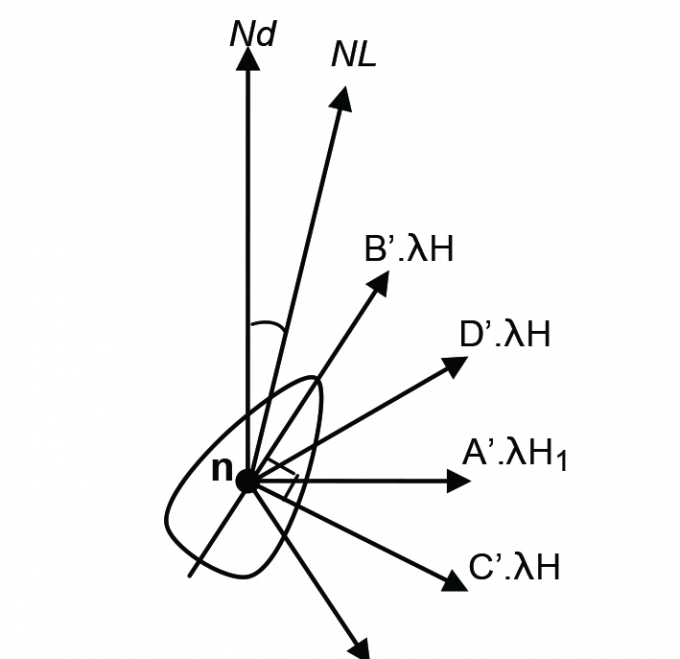
| Hình 2.2: Sơ đồ bố trí thực nghiệm |
Giá trị góc lệch giữa Nd và NL chính là độ lệch của la bàn từ. Trong các thực nghiệm của mình, tác giả sử dụng các phương pháp truyền thống khi tiến hành khử độ lệch la bàn từ trên tàu biển để xác định các hệ số trong phương trình độ lệch và đưa các hệ số này vào biểu thức tính độ lệch của la bàn từ kỹ thuật số để tính số hiệu chỉnh trên các hướng đi của tàu. Biểu thức tính độ lệch 0 của la bàn như sau:
δ = A + B. Sin(HL) + C.cos(HL) + D.sin(2HL) + E.cos(2HL) (2)
Trong đó:
δ - Độ lệch la bàn;
A, B, C, D, E - Hệ số (xác định qua thực nghiệm) [1];
HL - Hướng la bàn.
3. Mô tả thực nghiệm
Việc thực nghiệm hiệu chỉnh la bàn từ kỹ thuật số được thực hiện tại Phòng Thực hành la bàn từ của Khoa Hàng hải, Trường Đại học Hàng hải Việt Nam. Mô hình tàu làm bằng sắt được đỡ bằng một vành trượt và có thể quay trên trục thẳng đứng. Trên mô hình tàu có lắp đặt một trụ la bàn từ với đầy đủ các kết cấu phục vụ việc khử và hiệu chỉnh độ lệch cho la bàn từ như trên tàu thật.
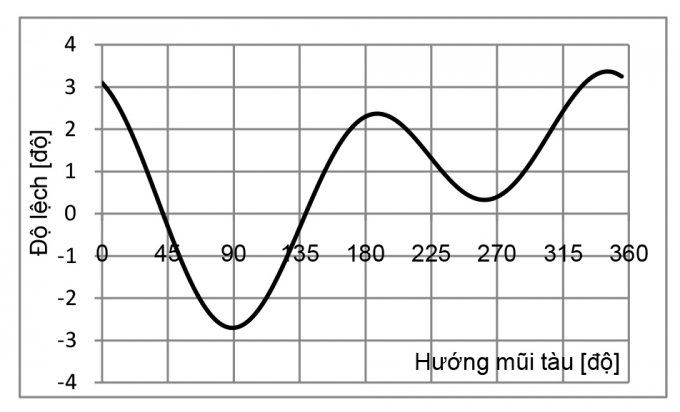 |
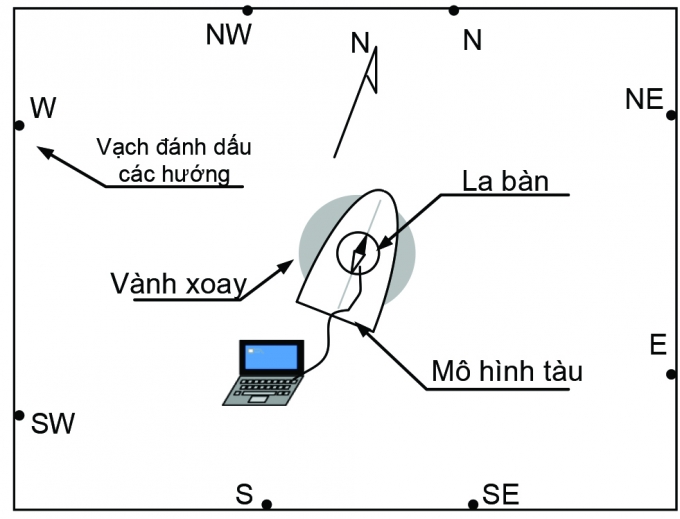
| Hình 3.1: Độ lệch la bàn theo hướng đi (TN 1) |
Các hướng chính Bắc (N), Nam (S), Đông (E), Tây (W) và các hướng phụ Đông Bắc (NE), Đông Nam (SE), Tây Nam (SW) và Tây Bắc (NW) tính từ vị trí đặt la bàn của tàu được xác định bằng la bàn chuẩn và đánh dấu trên tường của phòng thực hành, (Hình 2.2).
La bàn từ kỹ thuật số được kết nối với máy tính để hiển thị và ghi lại hướng chỉ của la bàn với tần suất 1 giây/lần. La bàn sử dụng trong thực nghiệm được gắn cảm biến từ HML HMC5883L của hãng Honeywell. Chi tiết về la bàn được mô tả trong bài ”Nghiên cứu chế tạo la bàn kỹ thuật số sử dụng cảm biến từ”, Tạp chí Khoa học - Công nghệ Hàng hải, số 440.
Bảng 3.1. Số chỉ la bàn tại các hướng đo trước khi hiệu chỉnh (TN 1)
 |
Khi tiến hành thực nghiệm, đặt la bàn từ kỹ thuật số tại đúng vị trí la bàn từ của mô hình tàu sau đó đặt biểu xích la bàn lên. Dây ngắm của biểu xích la bàn được đặt trùng với mặt phẳng trục dọc của tàu để có thể ngắm hướng mũi tàu tới các vạch đánh dấu trên tường của phòng thực hành. Tiến hành xoay toàn bộ hệ thống tới các hướng chính, phụ nêu trên và ghi lại số chỉ của la bàn tại các vị trí này.
Thực nghiệm 1:
Cho mũi tàu chỉ đúng hướng Bắc (N), ghi nhận số chỉ của la bàn tại vị trí này, sau đó quay mô hình tàu ngược chiều kim đồng hồ đến các hướng Tây Bắc (NW), Tây (W)... Kết quả, số chỉ của la bàn tại các hướng này như trên Bảng 3.1.
Từ các giá trị trong Bảng 3.1 xác định được các hệ số của biểu thức độ lệch la bàn như sau: A = -0,03, B = -1,5, C = 0,8, D = -0,1 và E = 1,95.Với các hệ số tìm được, lập được đồ thị độ lệch la bàn như trên Hình 3.1.
Bảng 3.2. Số chỉ la bàn tại các hướng đo sau khi đã hiệu chỉnh (TN 1)
 |
Nhập các hệ số tìm được vào phần mềm hiệu chỉnh độ lệch la bàn từ, sau đó tiến hành đo đạc lại hướng chỉ của la bàn tại các hướng chính, phụ đã nêu. Kết quả được thể hiện trong Bảng 3.2.
Hình 3.2 cho thấy sự khác nhau về độ lệch trước và sau khi sử dụng phần mềm hiệu chỉnh. Có thể thấy, trước khi tiến hành hiệu chỉnh, số chỉ của la bàn có độ lệch tại các hướng chính từ 1o đến 3,5o. Sau khi hiệu chỉnh, độ lệch số chỉ của la bàn chỉ nằm trong phạm vi 1o ở tất cả các hướng đi.
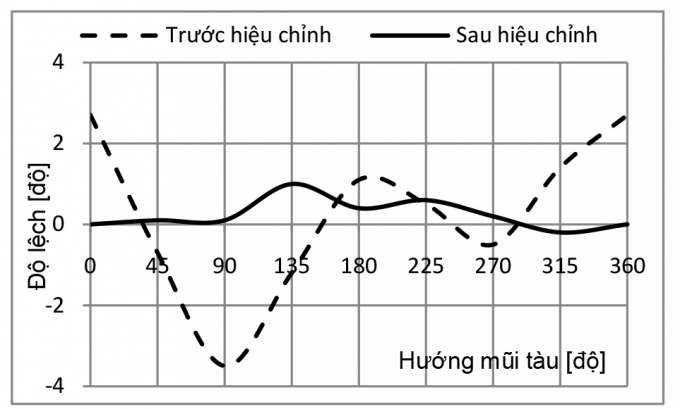 |
| Hình 3.2: So sánh độ lệch số chỉ la bàn (TN 1) |
Thực nghiệm 2
Tiến hành tương tự như thực nghiệm 1 nhưng quay mô hình tàu theo chiều cùng chiều kim đồng hồ với mục đích so sánh, phát hiện các sai số hệ thống trong thực nghiệm 1. Bắt đầu từ hướng Bắc (N), sau đó quay mô hình lần lượt qua các hướng Đông Bắc (NE), Đông (E)...
Bảng 3.3. Số chỉ la bàn tại các hướng đo trước khi hiệu chỉnh (TN 2)
 |
Kết quả thực nghiệm đạt được như trong Bảng 3.3. Cũng tương tự như kết quả trong thực nghiệm 1, độ lệch của số chỉ la bàn có giá trị lớn hơn tại các hướng đi 0o, 90o và 180o với giá trị độ lệch lớn nhất là 3o.
Bảng 3.4. Số chỉ la bàn tại các hướng đo sau khi đã hiệu chỉnh (TN 2)
 |
Sau khi xác định được độ lệch tại các hướng chính, phụ, áp dụng công thức tính được các hệ số trong biểu thức độ lệch la bàn như sau: A = 0,78, B = -1,55, C = 0,4, D = -0,28 và E = 1,93. Nhập các hệ số của biểu thức độ lệch la bàn vào phần mềm hiệu chỉnh, tiến hành quay mô hình tới các hướng chính, số chỉ của la bàn tại các hướng này như sau:
Có thể thấy, độ lệch la bàn tại các hướng đều giảm và chỉ còn nằm trong phạm vi nhỏ hơn 1o. Đồ thị so sánh giá trị số chỉ của la bàn trước và sau khi hiệu chỉnh trong thực nghiệm 2 được nêu trên Hình 3.3.
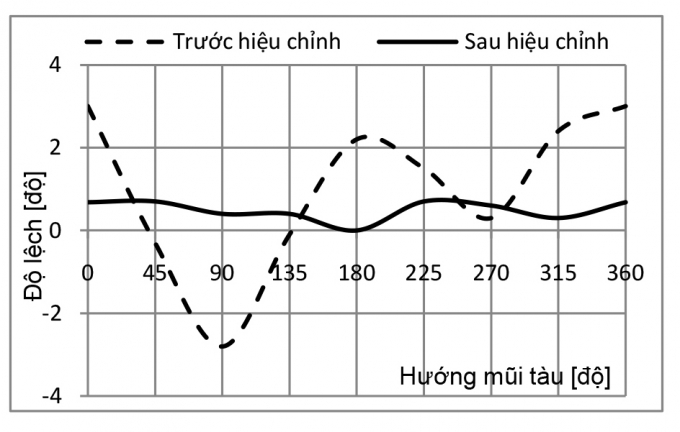 |
| Hình 3.3: So sánh độ lệch số chỉ la bàn (TN 2) |
Thực nghiệm 3
Trong các thực nghiệm 1 và 2, không có sự thay đổi nào về từ trường thứ cấp của con tàu mô hình bằng sắt. Để kiểm nghiệm hiệu quả làm việc của la bàn trong điều kiện từ trường khác (ví dụ một con tàu khác hay việc thay đổi kết cấu, từ tính của chính con tàu này), trong thực nghiệm 3, một số thanh sắt non được đưa vào thân tàu, gần với vị trí của la bàn. Các thanh sắt này sẽ làm thay đổi từ tính của con tàu so với các thực nghiệm trước và dẫn đến độ lệch của la bàn sẽ khác đi ở các hướng chạy tàu khác nhau.
Sau khi đưa các thanh sắt non vào vị trí, tiến hành xoay mô hình tàu 360o và đọc số chỉ của la bàn tại các hướng chính. Kết quả như sau:
Bảng 3.5. Số chỉ la bàn tại các hướng đo trước hiệu chỉnh (TN 3)
 |
Bảng 3.6. Số chỉ la bàn tại các hướng đo sau khi đã hiệu chỉnh (TN 3)
 |
Sau khi xác định được độ lệch tại các hướng chính, phụ, áp dụng công thức tính được các hệ số trong biểu thức độ lệch la bàn như sau: A = 0,78, B = -1,55, C = 0,40, D = -0,28 và E = 1,93. Nhập các hệ số của biểu thức độ lệch la bàn vào phần mềm hiệu chỉnh, tiến hành quay mô hình tới các hướng chính, số chỉ của la bàn tại các hướng này như trong Bảng 3.6.
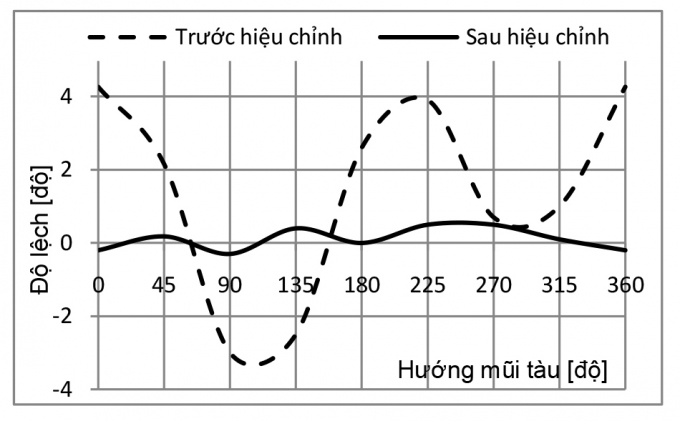 |
| Hình 3.4: So sánh độ lệch số chỉ la bàn (TN 3) |
Có thể thấy, độ lệch la bàn tại các hướng khi đo đều giảm và chỉ còn nằm trong phạm vi nhỏ hơn 1o. Đồ thị so sánh giá trị số chỉ của la bàn trước và sau khi hiệu chỉnh trong thực nghiệm 3 được thể hiện trên Hình 3.4.
4. Kết luận
Với số liệu thu được từ 3 thực nghiệm nêu trên, có thể thấy việc áp dụng biểu thức tính số hiệu chỉnh la bàn từ cho la bàn từ kỹ thuật số là hoàn toàn khả thi. Trong cả 3 thực nghiệm, với các điều kiện thử nghiệm khác nhau về từ trường thứ cấp của con tàu, số chỉ của la bàn có độ lệch luôn nhỏ hơn 1o. Độ lệch này chấp nhận được trong hàng hải thực tế. Đặc biệt, trong điều kiện hàng hải hiện nay, việc dẫn tàu còn có sự trợ giúp rất đắc lực của các hệ thống định vị toàn cầu.
Để đánh giá kỹ hơn về la bàn từ kỹ thuật số trong các điều kiện làm việc thực tế khác, cần phải có thực nghiệm với la bàn này trên tàu thật, trong điều kiện làm việc trên sông, biển. Những thực nghiệm này sẽ được tác giả thực hiện trong tương lai gần với tàu thực tập Sao Biển của Trường Đại học Hàng hải Việt Nam.
Tài liệu tham khảo
[1]. Đậu Văn Sơn (2014), Giáo trình La bàn từ.
[2]. Nguyễn Công Vịnh, Nghiên cứu chế tạo la bàn kỹ thuật số sử dụng cảm biến từ, Tạp chí Khoa học - Công nghệ Hàng hải, số 44.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.