Liên hệ quảng cáo
Tìm hiểu sơ lược về chân vịt bầu xoay của tàu thủy
Chân vịt bầu xoay là một bộ phận quan trọng của tàu vận tải đường biển và đường thủy, có những cấu tạo phức tạp.
 |
|
Ảnh minh họa |
Ảnh hưởng trực tiếp đến khả năng di chuyển cũng như tạo nên áp lực cho các con tàu vận chuyển đường biển, chân vịt được thiết kế tinh tế kết hợp cùng rất nhiều những bộ phận khác để tạo nên hệ thống chuyển động cho các con tàu.
Chân vịt là thiết bị đẩy tàu đi tới bằng cách sử dụng năng lượng được tạo ra và truyền từ máy chính. Sự chuyển động tới của tàu vận tải nội địa dựa trên nguyên tắc Bernoulli và định luật 3 Newton: sự chênh lệch áp suất giữa mặt trước và mặt sau của cánh chân vịt khi nó quay tạo ra lực đẩy.
Những thông số có ảnh hưởng trực tiếp đến lực đẩy gồm: đường kính chân vịt, độ nghiêng của cánh, tỷ số mặt đĩa (tổng diện tích mặt đạp/diện tích hình tròn có đường kính bằng đường kính chân vịt); tốc độ dòng chảy tại vị trí đặt chân vịt, số cánh, số vòng quay, profin cánh chân vịt…
Trên tàu biển hiện đại ngày nay có nhiều kiểu hệ thống chân vịt, hệ thống chân vịt đẩy kết hợp lái hiện đại cải tiến so với hệ thống đẩy kiểu chân vịt/bánh lái truyền thống. Trong số đó có loại Chân vịt bầu xoay (Azimuth thruster/Azimuth propulsion system). Đây là một loại thiết bị đẩy tàu trong đó chân vịt được đặt trên một quả bầu có thể xoay theo mọi hướng trong mặt phẳng nằm ngang, khiến cho tàu không cần có bánh lái. Bởi vậy tính quay trở của tàu tốt hơn tàu có chân vịt cố định và hệ bánh lái.
 |
|
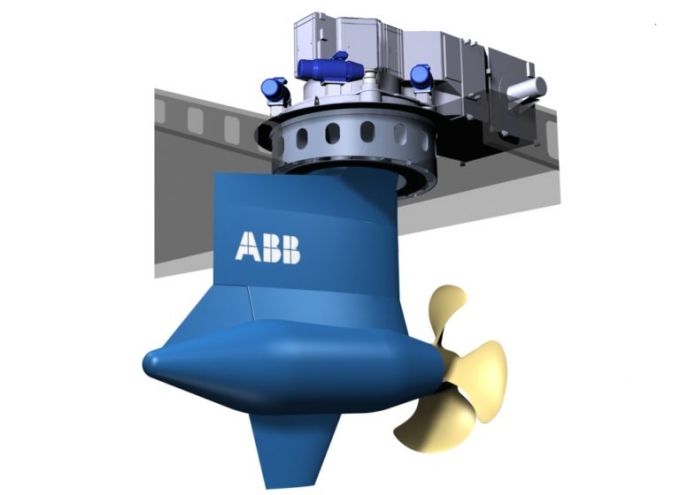
Hệ thống chân vịt bầu xoay Azipod |
Hiện nay có hai phương án truyền động của chân vịt bầu xoay, tùy theo vị trí của động cơ:
1. Truyền động cơ giới, trong đó động cơ nằm bên trong tàu nối với quả bầu bằng hệ thống bánh răng. Động cơ có thể thuộc loại diesel hay diesel-điện. Tùy theo cách bố trí trục mà chân vịt bầu xoay truyền động cơ giới có thể phân thành hai loại: truyền động chữ L (L-drive) và tryền động chữ Z (Z-drive). Thiết bị đẩy truyền động chữ L có một trục vào thẳng đứng và một trục ra nằm ngang và một hộp bánh răng vuông góc. Còn thiết bị đẩy truyền động chữ Z có một trục vào nằm ngang, một trục thẳng đứng và một trục ra nằm ngang và hai hộp bánh răng vuông góc.
2. Truyền động điện, trong đó một động cơ điện nằm ngay trong quả bầu được nối trực tiếp với chân vịt không cần bánh răng. Điện trên tàu do máy phát diesel hay turbin khí cung cấp.
Chân vịt bầu xoay có tên là ABB Azipod được F.W.Pleuger và F.Busmann (Hãng mang tên Pleuger Unterwasserpumpen GmbH) sáng chế vào năm 1955 và do Tập đoàn ABB sản xuất và là sản phẩm đầu tiên ứng dụng công nghệ này.
Chân vịt bầu xoay kết hợp với hệ thống lái tạo ra hệ thống đẩy được gọi là hệ thống đẩy Apizod. Trong các hệ thống đẩy truyền thống, động cơ được nối với trục chân vịt và chân vịt phía sau tàu và có một bánh lái đặt sau chân vịt. Nhưng trong hệ thống đẩy Azipod, hệ thống đẩy và hệ thống lái được kết hợp lại thành một. Hệ thống bao gồm một chân vịt được truyền động bởi một động cơ điện, chân vịt này đặt trên bầu có thể xoay 360 độ.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.