Liên hệ quảng cáo
Tính toán và thiết kế bộ điều khiển động cơ không đồng bộ rô-to lồng sóc bằng thuật toán PID
Bài báo tập trung xây dựng mô hình toán đối tượng và nghiên cứu thiết kế bộ điều khiển theo phương pháp PID.
|
TS. Đào Quang Thủy Bộ Khoa học và Công nghệ Người phản biện: TS. Ngô Mạnh Tiến TS. Đinh Anh Tuấn |
Tóm tắt: Bài báo tập trung xây dựng mô hình toán đối tượng và nghiên cứu thiết kế bộ điều khiển theo phương pháp PID. Kết quả mô phỏng bước đầu đã đánh giá về các chỉ tiêu kỹ thuật điều khiển như độ quá điều chỉnh, thời gian quá độ, đồng thời kết quả sẽ làm cơ sở để đánh giá và so sánh với các phương pháp điều khiển khác cho lớp đối tượng động cơ không đồng bộ rô-to lồng sóc.
Từ khóa: Phương pháp PID, động cơ không đồng bộ rô-to lồng sóc.
Abstract: This article concentrates on building model of objective mathematic and researching control base on PID method. Stimulation result has evaluated technical criteria such as độ quá điều chính, thời gian quá độ. This result also is basis to evaluate and compare to other controling methods to object asynchronous motor rotor cage.
Keywords: Method PID, asynchronous motor rotor cage.
1. Đặt vấn đề
Ngày nay, động cơ không đồng bộ 3 pha được sử dụng nhiều trong các nhà máy, xí nghiệp sản xuất có những ưu điểm: Hiệu suất cao; kết cấu đơn giản, gọn nhẹ; giá thành chế tạo và chi phí vận hành thấp; làm việc tin cậy; sử dụng tốt trong môi trường công nghiệp. Bên cạnh những ưu điểm thì nhược điểm của động cơ không đồng bộ (ĐCKĐB) 3 pha là phức tạp trong điều khiển do đặc tính phi tuyến mạnh. Chính vì vậy, việc nghiên cứu thiết kế các phương pháp điều khiển động cơ không đồng bộ 3 pha là một chiến lược cần thiết và quan trọng.
Bài báo tập trung nghiên cứu lý thuyết về các phương pháp điều khiển và mô hình toán học động cơ không đồng bộ 3 pha, cụ thể đã xây dựng cấu trúc và mô phỏng hệ thống điều khiển ĐCKĐB 3 pha.
2. Xây dựng mô hình hệ thống điều khiển ĐCKĐB 3 pha
2.1. Tuyến tính hóa mô hình điều khiển
Để thuận lợi cho việc thiết kế hệ thống điều khiển ta tuyến tính hóa mô hình động cơ xung quanh điểm làm việc, tại trạng thái xác lập ở điểm làm việc, ta có tốc độ ωlv, mô-men Mlv và dòng điện tải ilv. Giả sử hệ thống có dao động rất nhỏ quanh điểm làm việc thì các đại lượng như điện áp, dòng điện, mô-men, từ thông, tốc độ cũng sẽ có dao động nhỏ tương ứng là
 |
Phương trình toán học mô tả động cơ trên hệ tọa độ dq như sau [6]:
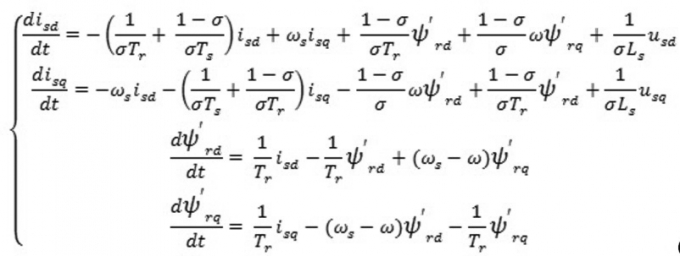 |
(1)
Thay tất cả các đại lượng trên vào hệ phương trình mô tả động cơ trên hệ tọa độ dq (1), sau phép biến đổi và bỏ qua các giá trị vô cùng bé bậc cao ta có hệ phương trình sau [1], [2]:
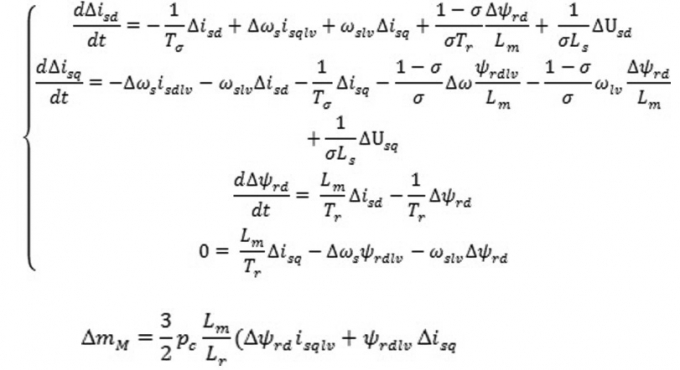 |
(2)
(3)
(4)
Từ hệ phương trình (3) và (4) ta lập được mô hình động cơ trên hệ tọa độ dq như sau:
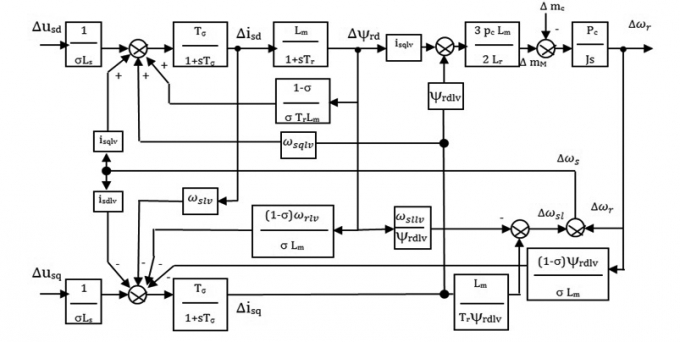 |
| Hình 2.1: Mô hình tuyến tính động cơ trên hệ toạ độ quay dq |
Nếu điều chỉnh mô-men động cơ quay theo quy luật từ thông không đổi thì có .
Mô hình tuyến tính mới có dạng:
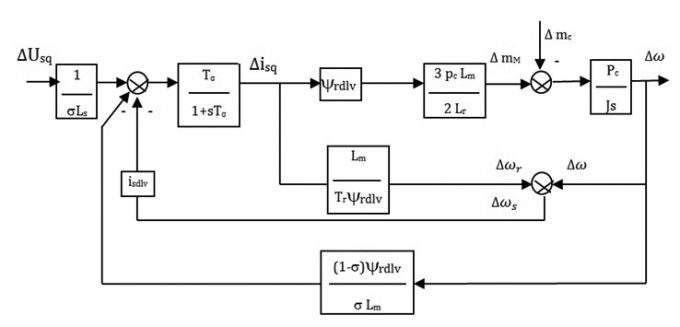 |
| Hình 2.2: Mô hình tuyến tính hóa rút gọn động cơ trên hệ tọa độ quay dq |
2.2. Xây dựng sơ đồ mạch điều khiển
Dùng các quy tắc biến đổi sơ đồ khối và đặt:
 |
Trong đó
Ta có sơ đồ mạch vòng điều tốc độ:
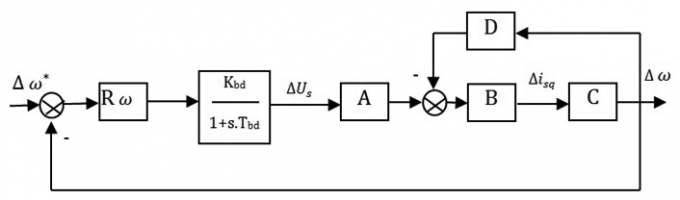 |
| Hình 2.3: Mạch điều chỉnh tốc độ |
Bộ nghịch lưu điều biến độ rộng xung PWM có hàm truyền:
Trong đó: Kbd - Hệ số khuếch đại, Tbd - Hằng số thời gia mạch nghịch lưu.
2.3. Tính toán thông số động cơ
Cho thông số động cơ như sau:
 |
Từ các tham số hệ cơ học đã cho, ta đi tính toán các tham số hệ truyền động dùng ĐCKĐB 3 pha rô-to lồng sóc.
Các tham số tính toán cho hệ truyền động sử dụng ĐCKĐB 3 pha điều khiển vec-tơ như sau:
- Điện cảm mạch sta-to:
- Điện cảm mạch rô-to:
- Hằng số thời gian sta-to:
- Hằng số thời gian rô-to:
- Hệ số tản từ:
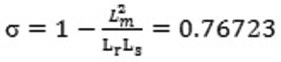 |
- Hằng số thời gian:
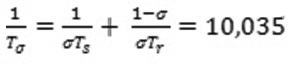 |
Thông số mạch nghịch lưu điều biến độ rộng xung với điện áp điều khiển Udk = 17,3 v điện áp ra U = 380V ta có kết quả tính toán Kbd = 380/17,3 = 22.
Chọn hằng số thời gian:
Vậy hàm truyền đạt khâu nghịch lưu là:
 |
Trong đó:
 |
3. Thiết kế bộ điều khiển ĐCKĐB 3 pha rô-to lồng sóc
3.1. Thiết kế bộ điều khiển PID
Từ sơ đồ mạch điều khiển tốc độ (Hình 2.3) ta có hàm truyền các khối BCD như sau:
 |
Hàm truyền của mạch vòng điều khiển tốc độ là:
 |
Hay:
Thay các thông số A, B, C, D, Kbđ, Tbđ và tính toán ta có hàm truyền:
Ta tổng hợp bộ PID theo phương pháp Ziegler-Nichols 2, xét hệ kín ta có:
Xét mẫu số = 0 với s = jω ta có:
 |
Giải phương trình và chỉ lấy các giá trị dương của ω ta được: ω = 86,74; Kth = 14,981; Tth = 0,0724s.
Theo phương pháp Ziegler-Nichols 2 ta xác định được các tham số của bộ điều khiển PID là KP = 0,6*14,98 = 8,9885; TI = 0,5*0,0724 = 0,0362 và TD = 0,12*0,0724 = 0,0086. Từ đó tính được KD = 0,0781, KI = 248,31.
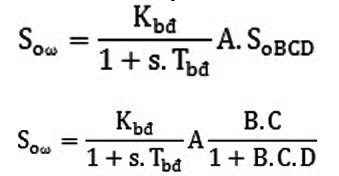
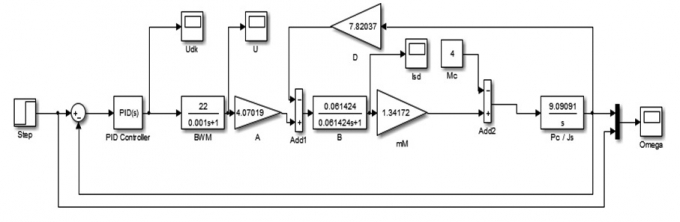
Cấu trúc điều điều khiển động cơ không đồng bộ bằng thuật toán PID có dạng như sau:
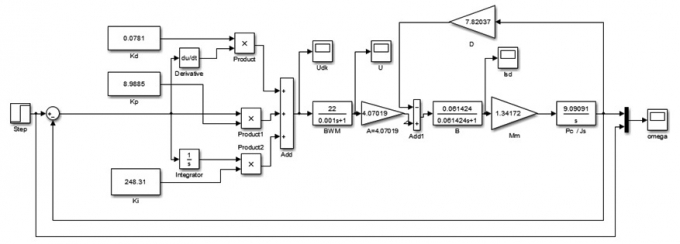 |
| Hình 3.1: Tổng hợp bộ PID theo phương pháp Ziegler-Nichols 2 |
Với các tham số như trên ta thu được đáp ứng của hệ thống như sau:
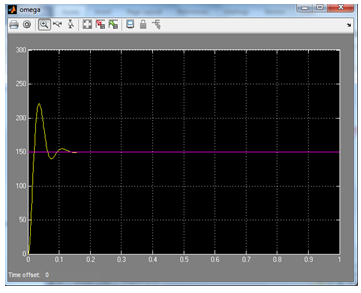 |
| Hình 3.1a: Kết quả mô phỏng theo phương pháp Ziegler-Nichols 2 |
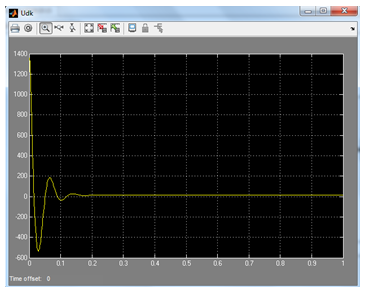 |
| Hình 3.1b: Điện áp điều khiển theo phương pháp Ziegler-Nichols 2 |
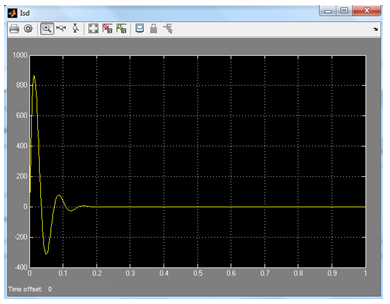 |
| Hình 3.1c: Dòng Isd theo phương pháp Ziegler-Nichols 2 |
Nhìn vào kết quả mô phỏng ta dễ dàng nhận thấy rằng thời gian đáp ứng và ổn đinh hệ thống của bộ PID tổng hợp theo phương pháp Ziegler-Nichols 2 là rất nhanh (0,15s), nhưng độ quá điều chỉnh rất lớn dẫn đến điện áp khởi động và dòng khởi động rất lớn. Với chỉ số điện áp và dòng lớn như thế thì không có bộ nghịch lưu biến đổi PWM và động cơ nào đáp ứng được. Có kết quả như thế là do phương pháp tổng hợp chỉ quan tâm tới thời gian đáp ứng của hệ thống chứ chưa tính đến khả năng của đối tượng thực tế. Vì vậy, ta tiến hành chỉnh định lại bộ PID để làm giảm điện áp điều khiển và dòng điều khiển cho phù hợp với động cơ.
 |
| Hình 3.2: Bộ PID số 2 |
Ta xác định các thông số của bộ PID như sau: KP = 0,0067432, KI = 0,29562, KD = 0. Khi đó ta có kết quả mô phỏng:
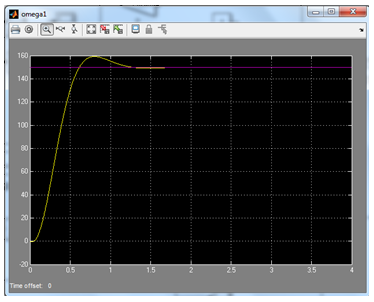 |
| Hình 3.2a: Kết quả mô phỏng bộ PID thứ 2 |
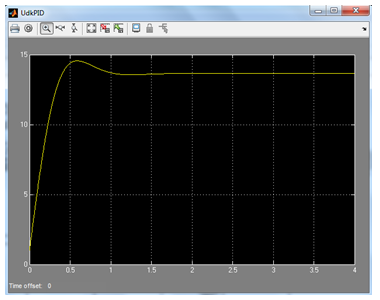 |
| Hình 3.2b: Điện áp điều khiển của bộ PID thứ 2 |
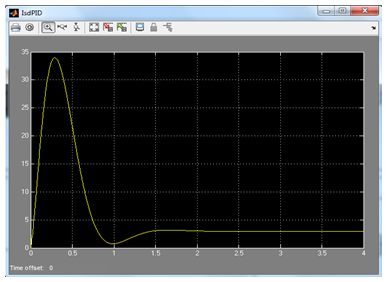 |
| Hình 3.2c: Dòng Isd của bộ PID thứ 2 |
4. Kết luận
Bài báo đã tổng hợp mô hình toán động cơ không đồng bộ đưa về hệ tọa độ dq, trên cơ sở đó đã tính toán và thiết kế bộ điều khiển PID. Kết quả mô phỏng cho thấy độ quá điều chỉnh:
Thời gian đáp ứng và ổn định tốc độ của động cơ khi tín hiệu đặt là ω = 150 (Rad/s) hay n = 1430 (vòng/phút) là khoảng 1,7s. Điện áp điều khiển lớn nhất Udkmax = 14,1V, dòng điện khởi động Ikd = 34A ≈ 3(Idm = 11,2A). Điện áp và dòng điện khi tốc độ ổn định là 13,1V và 2,9A.
Tài liệu tham khảo
[1]. Nguyễn Văn Đạt, Vũ Tư Khoa (2006), Nghiên cứu phương pháp mô tả động cơ không đồng bộ ba pha trên hệ tọa độ tựa theo từ trường rotor, tập IV, số 2, Tạp chí KHKT Nông nghiệp.
[2]. Nguyễn Lê Hoàng (2012), Ứng dụng MATLAB & SIMULINK để mô phỏng động cơ không đồng bộ ba pha theo phương pháp điều khiển vector với bộ điều khiển PID, Tập san Thông tin khoa học & Giáo dục, số 6, Tạp chí Đại học Đông Á.
[3]. Cù Tuấn Anh (2015), Nâng cao chất lượng điều khiển động cơ không đồng bộ rotor lồng sóc trên cơ sở mờ trượt, Luận văn Thạc sỹ kỹ thuật.
[4]. Phan Xuân Minh, Nguyễn Doãn Phước (2002), Lý thuyết điều khiển mờ, NXB. KH&KT.
[5]. Nguyễn Doãn Phước, Phan Xuân Minh, Hán Thành Trung (2006), Lý thuyết điều khiển phi tuyến, NXB. KH&KT.
[6]. Nguyễn Phùng Quang (2006), MATLAB & SIMULINK dành cho kỹ sư điều khiển tự động, NXB. KH&KT.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.