Liên hệ quảng cáo
Xác định vận tốc nguy hiểm của ô tô khi quay vòng bằng phần mềm Carsim
Vận tốc nguy hiểm của ô tô khi quay vòng phụ thuộc vào rất nhiều yếu tố và luôn cần được xác định chính xác trên những đường có địa hình phức tạp để đảm bảo ATGT
|
KS. Hoàng Tùng Nghĩa TS. Hoàng Thăng Bình Trường Đại học Bách khoa Hà Nội Người phản biện: TS. Dương Khánh Ngọc PGS.Nguyễn Ngọc Hoan |
Tóm tắt: Vận tốc nguy hiểm của ô tô khi quay vòng phụ thuộc vào rất nhiều yếu tố và luôn cần được xác định chính xác trên những đường có địa hình phức tạp để đảm bảo ATGT. Nghiên cứu trong bài báo sử dụng phần mềm Carsim để xác định vận tốc nguy hiểm của ô tô con khi quay vòng liên tục trên các cung đường có độ dốc, có bán kính khác nhau và so sánh kết quả với phương pháp tính trên cơ sở lý thuyết về động lực học quay vòng ô tô. Kết quả nghiên cứu cho thấy, vận tốc nguy hiểm xác định bằng phần mềm gần với thực tế xét đến các điều kiện môi trường khác nhau để đảm bảo an toàn và ổn định của ô tô khi quay vòng, phương pháp xác định cho kết quả nhanh chóng, trực quan và áp dụng được cho từng xe cụ thể.
Từ khóa: Động lực học quay vòng, tính ổn định của ô tô khi quay vòng, phần mềm Carsim, vận tốc nguy hiểm khi quay vòng.
Abstract: Dangerous corneringspeed of vehicle depends on many factors and should always be determined exactly on the road of complex terrain in order to ensure traffic safety. This study has used the Carsim software to determinethe dangerous speed of car when cornering continuosly on the road with slope and different turning radius andto compare the results with the calculation method based on the theory of automotive vehicle turning dynamics. The study results showed that, dangerous speed determined by the software is closer to reality taking consideration ofvarious environmental conditions to ensure safety and stability of the car atcornering, determination method enabled quick results, intuitive and applicable to each specific vehicle.
Keyword: Turning dynamics, automotive stability at cornering, Carsim software, dangerous cornering speed.
1. Đặt vấn đề
GTVT là nền tảng phát triển của một quốc gia. Sự phát triển kinh tế - xã hội đều dựa trên sự lưu thông hàng hóa, tốc độ lưu thông hàng hóa càng được tăng cao thì càng góp phần thúc đẩy phát triển kinh tế - xã hội. Tuy nhiên, điều đó cũng mang đến nhiều hậu quả không mong muốn như TNGT, gây ra thiệt hại rất lớn về người và của. Do vậy, việc xác định vận tốc nguy hiểm của xe ô tô khi đi trên đường nói chung và khi quay vòng nói riêng là bài toán quan trọng mà cơ quan quản lý nhà nước cũng như nhà quản lý vận tải đều mong muốn tìm lời giải để đảm bảo cả tính an toàn và tính kinh tế.
Việc xác định vận tốc nguy hiểm khi quay vòng bằng các tính toán lý thuyết đơn thuần thường áp dụng tốt cho những điều kiện khá lý tưởng như: Mặt đường tốt và bằng phẳng, không có gió, bán kính quay vòng không thay đổi…; còn trong các điều kiện thực tế thường phải giảm xuống theo cảm nhận của người lái nên nhiều khi không được như mong muốn, do có rất nhiều yếu tố ảnh hưởng đến chuyển động của ô tô trong thực tế.
Thông qua nghiên cứu ứng dụng phần mềm Carsim, vận tốc nguy hiểm của ô tô khi quay vòng có thể xác định được một cách gần đúng nhất với thực tế. Phương pháp mô phỏng trong Carsim có thể thiết lập được các yếu tố chủ quan và khách quan tác động đến chuyển động của ô tô, đó là các yếu tố của môi trường, các yếu tố ảnh hưởng của người lái và các yếu tố ảnh hưởng bởi thông số kết cấu xe.
2. Cơ sở lý thuyết
2.1. Động lực học quay vòng với bánh xe đàn hồi
Khi quay vòng, lực ly tâm sinh ra chính là lực ngang tác dụng lên các bánh xe đàn hồi và làm cho chúng bị biến dạng tạo ra góc lệch bên của bánh xe, làm lệch hướng chuyển động và có thể gây ra hiện tượng quay vòng thừa hoặc quay vòng thiếu. Giá trị của góc lệch bên phụ thuộc vào giá trị lực ngang và độ cứng lệch bên của lốp theo công thức 1.
Fy = CL `delta` (1)
Trong đó: Fy - Lực ngang; CL - Độ cứng của góc lệch bên của bánh xe; δ - Góc lệch bên.
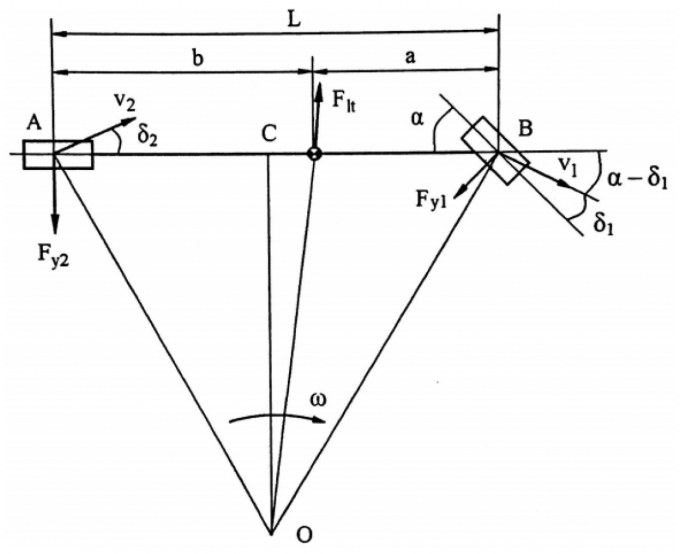 |
| Hình 2.1: Mô hình quay vòng 1 vết |
Mô hình động lực học quay vòng của ô tô trong mặt phẳng quy về một vết được thể hiện trong Hình 2.1. Xe có chiều dài cơ sở L, trọng tâm đặt tại C cách bánh trước và bánh sau một khoảng lần lượt là a và b, xe quay vòng quanh tâm quay tức thời O với vận tốc góc ω, các bánh trước có góc lệch bên trung bình là δ1, các bánh sau có góc lệch bên trung bình là δ2, bánh xe trước và sau sẽ lăn theo phương của véc-tơ vận tốc v1 và v2. Các tính toán động lực học sau đây được thực hiện với giả thiết các bánh xe lăn không trượt.
Khi quay vòng với vận tốc lớn, các góc lệch bên δ1, δ2 và góc quay bánh xe dẫn hướng α có giá trị nhỏ. Khi đó, bán kính quay vòng R cũng lớn hơn nhiều so với chiều dài cơ sở L ( R>>L).
 |
K được gọi là hệ số quay vòng. Khi K = 0 (δ1 = δ2), góc lệch bên của bánh trước và bánh sau như nhau, bán kính quay vòng được giữ nguyên, xe quay vòng đủ. Khi K > 0 (δ1>δ2), góc lệch bên của bánh trước lớn hơn của bánh sau, bán kính quay vòng thực tế lớn hơn, xe quay vòng thiếu. Khi K < 0 (δ1<δ2), góc lệch bên của bánh sau lớn hơn của bánh trước làm bán kính quay vòng thực tế nhỏ hơn, xe quay vòng thừa. Ảnh hưởng của hệ số K tới đặc tính quay vòng được thể hiện trên Hình 2.2.
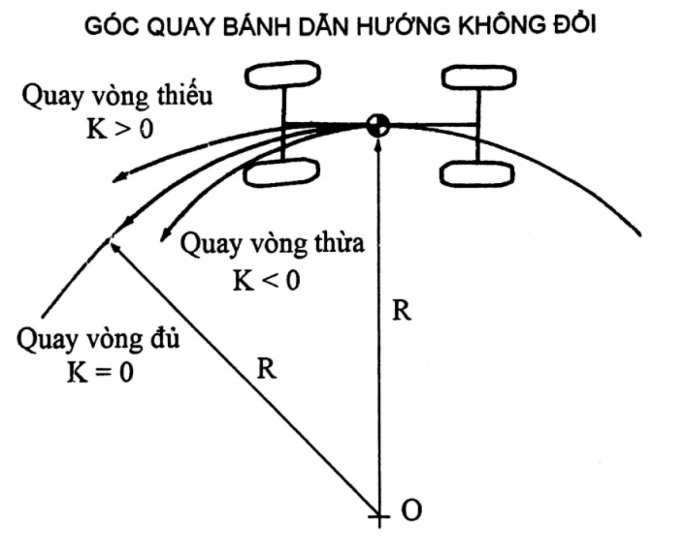 |
| Hình 2.2: hệ số K và các trạng thái quay vòng của ô tô |
2.2. Tính ổn định của ô tô khi quay vòng
Xét trường hợp ô tô quay vòng trên đường nghiêng ngang ra ngoài là trường hợp ô tô dễ bị mất ổn định, bị lật ngang hay trượt ngang khi chịu lực ly tâm.
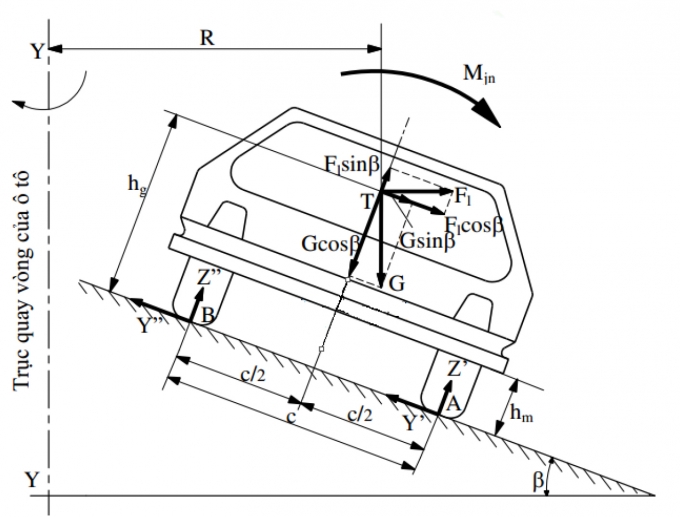 |
| Hình 2.3: Lực và mô-men tác động lên ô tô khi quay vòng trên đường nghiêng ra ngoài |
Trên Hình 2.3, ô tô có chiều rộng cơ sở là c, có trọng lượng G đặt tại trọng tâm T cách mặt đường một khoảng hg, ô tô quay vòng quanh trục YY trên mặt đường nghiêng ra ngoài với góc dốc β. Khi đó, ngoài trọng lực G tác dụng lên ô tô còn có lực ly tâm F1, phản lực từ mặt đường tác dụng lên bánh xe Z’, Z’’, Y’, Y’’, mô-men của các lực quán tính tiếp tuyến Mjn.
Khi vận tốc ô tô đạt đến giá trị giới hạn Vn, dưới sự tác động của lực ly tâm F1, xe sẽ bị lật đổ quanh trục đi qua điểm A (trục này là giao tuyến giữa mặt phẳng đường với mặt phẳng lăn của bánh xe bên phải), ở thời điểm đó thành phần phản lực thẳng đứng từ mặt đường tại điểm B là Z” = 0.
Lập phương trình cân bằng mô-men đối với trục lật qua A để tính hợp lực của hai bánh bên trái Z’’ và tính được:
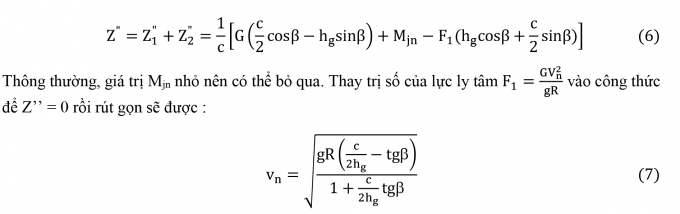 |
Mặt khác, khi quay vòng trên đường nghiêng ngang ô tô có thể bị trượt ngang dưới tác dụng của các thành phần lực Gsinβ và F1cosβ. Gọi vận tốc giới hạn khi đó là vφ. Ở thời điểm ô tô bắt đầu trượt ngang, các phản lực ngang sẽ bằng lực bám như biểu thức 8, trong đó φy là hệ số bám ngang.
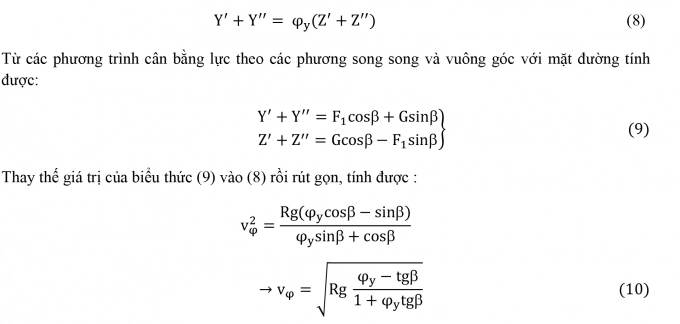 |
3. Xác định vận tốc nguy hiểm bằng phầ̀n mềm Carsim
Carsim là một phần mềm mô phỏng động lực học ô tô con, thuộc bộ phần mềm mô phỏng động lực học ô tô do Công ty Mechanical Simulation Coporation (Mỹ) xây dựng và phát triển.
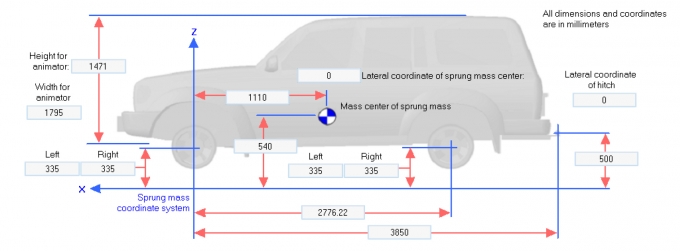
Trong nghiên cứu này, xe sedan được chọn làm đối tượng để thực hiện mô phỏng. Các thông số của một chiếc xe thực tế như các kích thước cơ bản, khối lượng, thông số động cơ, thông số của hệ thống truyền lực, hệ thống treo, hệ thống phanh, hệ thống lái… được đưa vào phần mềm như ví dụ ở Hình 3.1. Các điều kiện của đường như độ dốc, độ bám, bán kính cung đường, gió… cũng được đưa vào giống như môi trường giao thông thực tế.
 |
| Hình 3.1: Nhập thông số hệ thống treo |
3.1. Xác định vận tốc giới hạn cho từng cung đường
Khảo sát đầu tiên cho xe sedan được thực hiện trên đường bằng, có bán kính không đổi và có hệ số bám định trước như trên Hình 3.2.
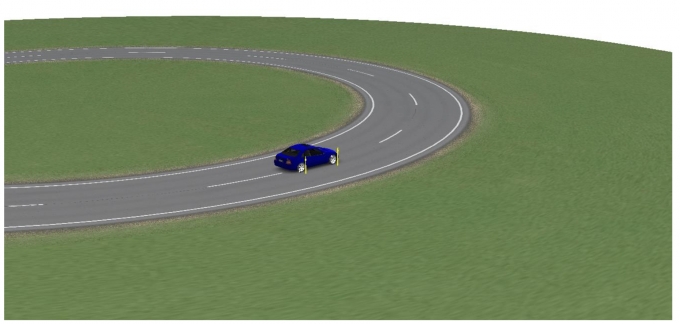 |
| Hình 3.2: Mô phỏng quay vòng xe |
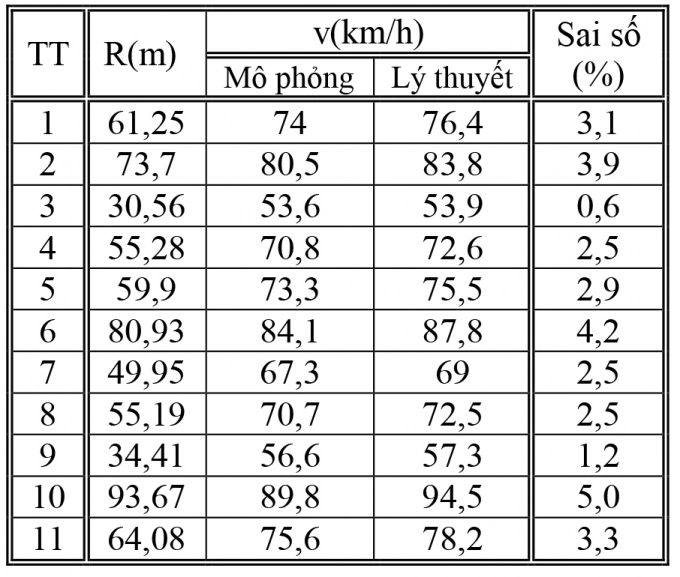
Vận tốc của ô tô được tăng dần cho tới khi độ lệch quỹ đạo của ô tô lớn hơn 0,2m thì dừng và lấy đó làm giá trị vận tốc giới hạn. Giá trị độ lệch quỹ đạo 0,2m dựa trên tiêu chuẩn TCVN-4054, lớn hơn giá trị này xe có thể không nằm trong hành lang an toàn và có thể lấn sang làn xe khác. Tiến hành tương tự trên nhiều đường có cùng hệ số bám 0,75 nhưng có các bán kính khác nhau sẽ thu được kết quả như trong Bảng 3.1. So sánh với kết quả tính toán bằng lý thuyết theo công thức 10 khi β = 0, có thể thấy giá trị thu được từ phần mềm Carsim có sai số lớn nhất là 5% so với tính toán lý thuyết nhưng có giá trị nhỏ hơn. Như vậy, kết quả tính toán mô phỏng đạt độ tin cậy và nếu sử dụng kết quả này sẽ mang lại độ an toàn cao hơn cho ô tô khi quay vòng.
3.2. Xác định vận tốc giới hạn trên đường dốc và có nhiều khúc cua liên tiếp
Khảo sát tiếp theo cho cùng đối tượng xe sedan được thực hiện trên đường dốc và có nhiều khúc cua liên tiếp nhằm đánh giá vận tốc nguy hiểm trên đường có địa hình phức tạp.
Bảng 3.1. Vận tốc nguy hiểm ứng với từng bán kính quay vòng với hệ số bám là 0,75
 |
Đường trong mô phỏng hình thành từ 11 cung đường có bán kính lấy giá trị từ Bảng 3.1, được đánh số và được thiết lập có độ dốc như trong Hình 3.3.
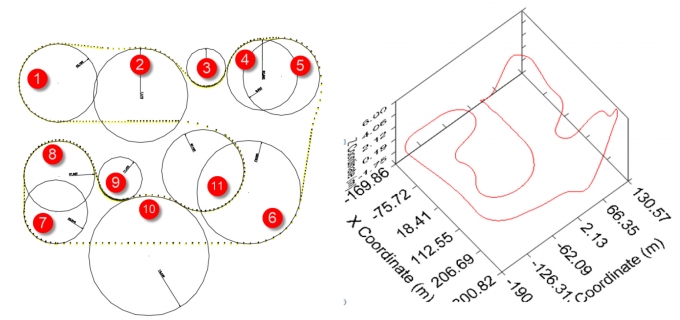 |
| Hình 3.3: Thiết lập đường khảo sát |
Quá trình chạy mô phỏng giống như Hình 3.4 với vận tốc trên từng khúc cua lấy từ kết quả mô phỏng trong Bảng 3.1. Kết quả độ lệch quỹ đạo trên Hình 3.5 cho thấy, mặc dù vận tốc nguy hiểm đã được chọn nhỏ hơn giá trị tính toán lý thuyết, nhưng khi áp dụng trên đường dốc và quay vòng liên tiếp thì vẫn có thể xảy ra việc lệch làn gây nguy hiểm. Do vậy, trong bước khảo sát tiếp theo, vận tốc của ô tô tại những cung đường có độ lệch lớn được điều chỉnh để xe không bị trượt nhiều và có độ lệch nằm trong tiêu chuẩn cho phép. Kết quả độ lệch làn sau khi điều chỉnh được thể hiện trong kết quả mô phỏng Hình 3.5 và sự biến thiên vận tốc được thể hiện triên Hình 3.6. Kết quả mô phỏng cho thấy, khi xe chạy trên các đường dốc và quay vòng liên tục, vận tốc giới hạn để xe chạy đảm bảo an toàn nhỏ hơn vận tốc giới hạn khi quay vòng bình thường.
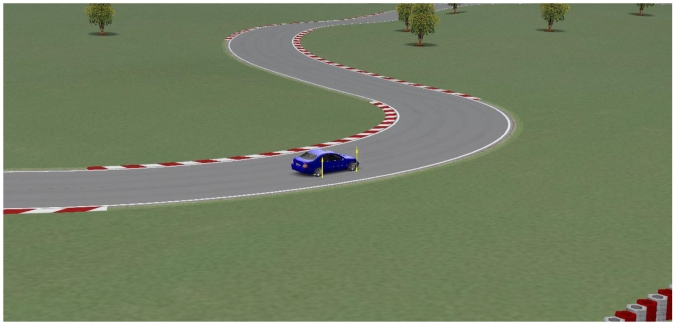 |
| Hình 3.4: chạy mô phỏng trên đường thử |
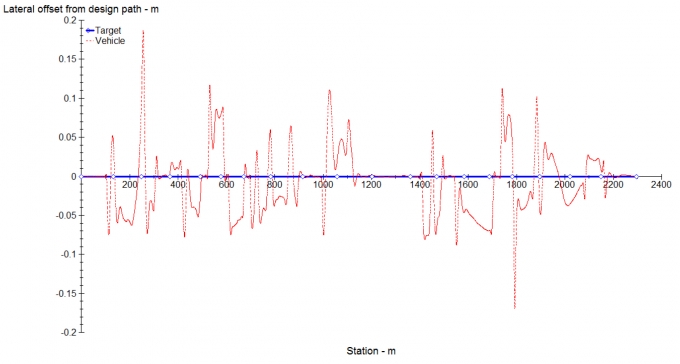 |
| Hình 3.5: Dộ lẹch ngang của xe so với tâm quỹ đạo chuyển động |
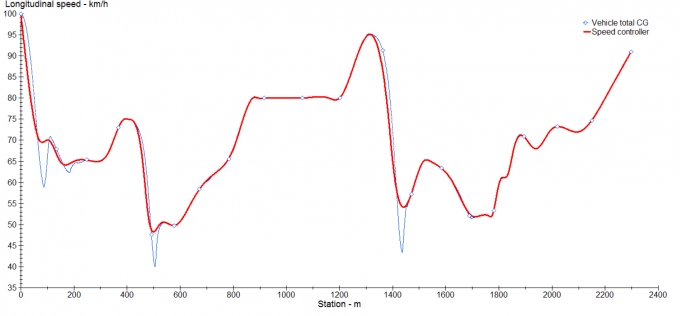 |
| Hình 3.6: Vận tốc chạy xe trên đường |
4. Kết luận
Nghiên cứu mô phỏng sử dụng phần mềm Carsim để xác định vận tốc nguy hiểm khi quay vòng đã cho kết quả tin cậy. Phương pháp mô phỏng trực quan, đưa ra kết quả nhanh chóng, áp dụng được cho từng đối tượng ô tô, từng cung đường có địa hình và điều kiện khác nhau. Công cụ này có thể hỗ trợ các nhà quản lý giao thông cắm các biển hạn chế tốc độ để đảm bảo ATGT, đồng thời giúp các nhà quản lý vận tải kiểm soát tốc độ và hành trình của các phương tiện vận tải của đơn vị mình.
Tài liệu tham khảo
[1]. PGS. TS. Lưu Văn Tuấn (2015), Bài giảng Động lực học ô tô, Lưu hành nội bộ.
[2]. PGS. TS. Nguyễn Khắc Trai (1997), Tính điều khiển và quỹ đạo chuyển động của ô tô, NXB. GTVT.
[3]. Bộ Khoa học và Công nghệ, TCVN-4054. (2005).
[4]. File hướng dẫn sử dụng phần mềm Carsim, 2009.
[5]. TS. Đặng Quý (2012), Giáo trình lý thuyết ô tô, NXB. Đại học Quốc gia Hồ Chí Minh.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.