Liên hệ quảng cáo
Khảo sát, đánh giá mô hình độ cao số địa hình - DTM được xây dựng trên hai phần mềm Global Mapper và Fusion LDV từ ảnh chụp UAV
Các phần mềm xử lý ảnh UAV (Unmanned Aerial Vehicle) cho kết quả mô hình số bề mặt DSM (Digital Surface Model) và ảnh trực giao với độ chính xác cao, có thể sử dụng cho nhiều mục đích khác nhau. Bài báo nghiên cứu này tập trung vào việc tự động hóa tạo mô hình số địa hình DTM (Digital Terrain Model) dựa trên các đám mây điểm (Point Cloud) có được từ quá trình xử lý ảnh UAV. Nhóm tác giả thực hiện bay chụp với điểm khống chế, xử lý ảnh với Agisoft tạo Point Cloud. Sử dụng Fusion và Global Mapper để lọc loại bỏ các địa vật. Sản phẩm DTM được tạo ra bằng hai phần mềm được kiểm tra, đánh giá bằng các số liệu đo trực tiếp ở thực địa với máy toàn đạc điện tử nhận được độ chính xác lên đến 95,2% đối với sản phẩm tạo ra từ Fusion LDV và 84% đối với sản phẩm tạo ra từ Global Mapper.
Tác giả: ThS. TRẦN NGỌC HUYỀN TRANG
ThS. NGUYỄN HỮU ĐỨC
Trường Đại học Tài nguyên và Môi trường TP. Hồ Chí Minh
ThS. NGUYỄN HÀ TRANG
Yamagata University, Japan
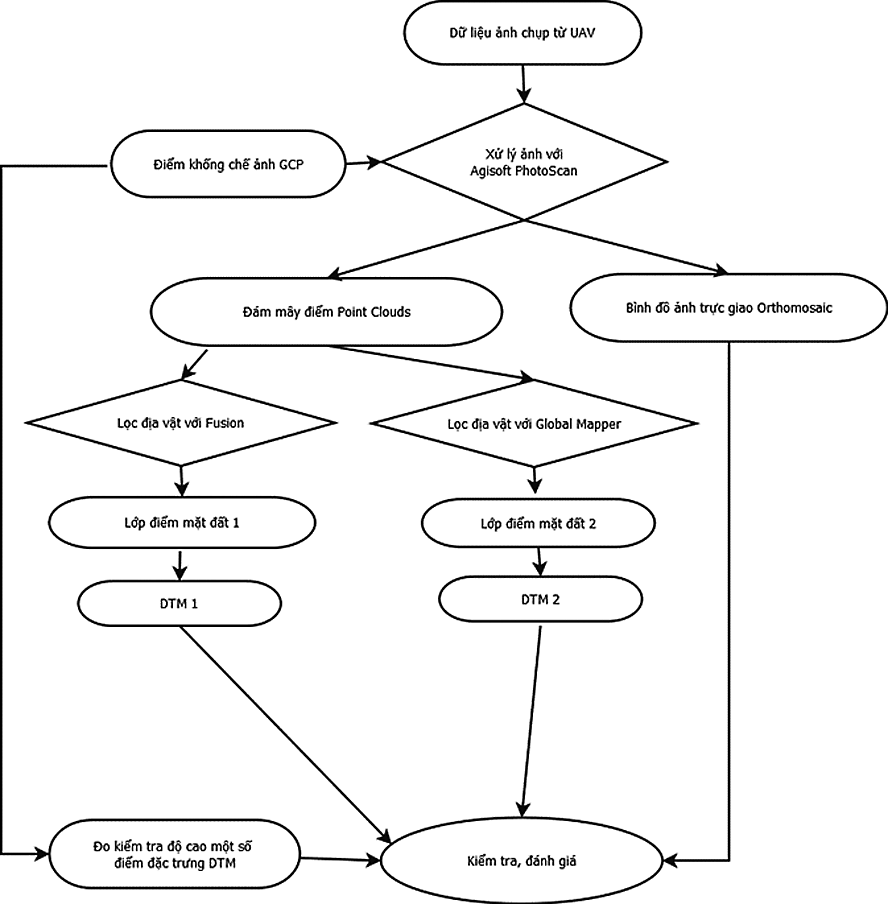 |
| Quy trình tạo mô hình DTM tự động theo hai phương pháp và đánh giá mô hình |
UAV là tên gọi dùng chung cho các thiết bị máy bay không người lái sử dụng thiết bị điều khiển từ xa, là thiết bị có thể điều khiển tự động, bán tự động hoặc kết hợp giữa điều khiển từ xa và tự động.
UAV được ứng dụng trong nhiều lĩnh vực, có thể dùng để tạo ra nhiều loại bản đồ khác nhau. Các phần mềm xử lý ảnh cho phép tạo ra ảnh nắn ghép trực giao với độ chính xác cao, có thể đáp ứng về thành phần mặt bằng. Point Cloud là sản phẩm xử lý ảnh có thể dùng để phục vụ cho việc tính toán, thể hiện các chủ đề liên quan đến độ cao. Tuy nhiên, Point Cloud bao gồm các điểm ở trên mặt đất và trên địa vật như nhà cửa, cây cối... Muốn tạo DTM thì cần lọc bỏ các điểm địa vật đi. Một số biện pháp như lựa chọn điểm thủ công, hiệu chỉnh chiều cao địa vật... Những cách này tốn khá nhiều thời gian và công sức. Bài nghiên cứu xử lý tự động tạo DTM từ Point Cloud theo hai hướng:
Hướng thứ nhất, phần mềm Fusion với sự kết hợp nhiều hàm toán học để lọc địa vật tự động. Đây là phần mềm mã nguồn mở được phát triển bởi Robert J. McGaughey thuộc Forest service USDA. Phần mềm được phát triển nhằm mục đích phục vụ cho các nhà nghiên cứu xử lý và phân tích dữ liệu đám mây điểm từ LiDAR. Khác với các phần mềm thương mại, các thuật toán trong Fusion thường được kết hợp lại với nhau ở dạng batch file và chạy trên nền command promt cho một quá trình xử lý [1].
Hướng thứ hai là sử dụng Global Mapper. Khác với Fusion LDV, Global mapper là phần mềm thương mại có giao diện sống động dễ tiếp cận người dùng với nhiều chức năng để xử lý Point Cloud. Bên cạnh đó, Global Mapper còn hỗ trợ phong phú các định dạng file khác nhau như LAS, Arc ASCII grid file, ArcGIS layer package, 2DM, 3DS, vector files, raster files và nhiều định dạng khác [2].
Để khảo sát mức độ phù hợp của các giải pháp tạo DTM tự động, tiến hành so sánh và đánh giá kết quả hai mô hình DTM từ hai hướng trên.
Mời độc giả xem nội dung đầy đủ bài khoa học tại đây
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.