Liên hệ quảng cáo
Nghiên cứu hệ thống nồi đất trục chân vịt tàu thủy
Khi trục chân vịt quay sẽ xuất hiện sự chênh lệch điện thế giữa nó và vỏ tàu. Nguyên nhân chính là do hiệu ứng Peltier – Seebeck vì có sự chênh lệch nhiệt độ giữa hai bên kết nối phía máy chính và phần gắn chong chóng của trục sẽ sinh ra một hiệu điện thế.
Nguyên nhân thứ hai là bởi có thể coi như trục này như một thanh dẫn chuyển động trong một điện trường, mà trục này lại cách điện với vỏ tàu thông qua các vòng bi có các màng dầu bôi trơn và phần đuôi (nơi gắn với chân vịt) người ta dùng bệ đỡ là các chất phi kim loại. Sự chênh lệch điện thế này sẽ gây ra một số tác hại như: Tạo ra các lỗ hổng tại chân vịt, ăn mòn đỉnh cánh chân vịt và tạo ra tia lửa điện tại vị trí các ổ đỡ vòng bi dẫn đến bị ăn mòn, nhanh hỏng thậm chí có thể gây cháy nổ. Bài báo sẽ phân tích nguyên nhân, đo đạc và giám sát giá trị điện áp này và đưa ra biện pháp khắc phục.
- TS. Vương Đức Phúc
- TS. Đáo Minh Quân
Trường Đại học Hằng hải Viêt Nam
Người phản biện: TS. Đinh Anh Tuấn
PGS. TS. Trần Anh Dũng
Từ khóa: Chân vịt hệ thống trục nối đất, nguyên nhân ăn mòn tia điện, hậu quả của ăn mòn tia điện, thu thập dữ liệu.
Abstract: When a propeller shaft is being rotated, it will generate a voltage potential difference between the shaft and the hull. The first main reason is due to Peltier – Seebeck effect that because of a different temperature on each side including the side near main engine and the side helding a propeller. Next reason is that the shaft can be considered as conductor moving in electric field; in addition, the shaft is insulated from ship hull by the lubricating oil film in the bearings and by use of non – metallic bearing materials in the tail shaft. The electrical potential between shaft and hull can cause harmful effects such as: Formation of deeper pits in propellers, cavitation damage to the tips of the propellers and spark erosion resulting in damage to the bearings, even It may also lead to explosion. This paper will show the reasons, the way to measure and monitor the voltage and solutions to avoid these troubles.
Keywords: Propeller shaft earthing system, reasons for spark erosion, effects of spark erosion, labVIEW, data acquisition.
1. Giới thiệu
Hệ thống nối đất trục chân vịt [1, 2] có vai trò rất quan trọng, tuy nhiên hiện nay có rất ít tài liệu viết về vấn đề này thậm chí là các tài liệu tiếng anh. Tham khảo các tài liệu liên quan đến đăng kiểm của Việt Nam cũng chưa đề cập đến yêu cầu kỹ thuật, cách thức kiểm tra và bảo dưỡng cho hệ thống này. Như trên đã đề cập nếu tàu không trang bị hệ thống này hay nó hoạt động không đúng yêu cầu kĩ thuật thì tác hại là vô cùng nghiêm trọng [1]. Khi vòng bi tại các ổ đỡ bị ăn mòn hay có tia lửa sẽ dẫn đến nhiều hệ lụy nguy hiểm, nó có thể dẫn đến việc cháy nổ, bôi trơn cho trục bị ảnh hưởng dẫn đến tải cho máy chính tăng… Trong trường hợp vòng bi hay bệ đỡ trục chân vịt bị hỏng, ngoài vấn đề thay thế phức tạp và tốn kém thì nó còn ảnh hưởng tới quá trình khai thác tàu. Để tránh các tác hại này thì cần phải triệt tiêu điện áp cảm ứng thông qua hệ thống nối đất cho trục chân vịt.
2. Chế tạo thiết bị đo và giám sát dùng phần mềm LabVIEW [3 - 5]
Hệ thống đo và giám sát này có các tín hiệu vào bao gồm: Điện áp trục và tốc độ vòng quay máy chính. Tín hiệu điện áp trục là sự chênh áp giữa trục và vỏ tàu có giá trị vào khoảng từ 0 – 1 Vôn, tín hiệu vòng quay được lấy từ bộ chỉ báo vòng quay trên tàu có chuẩn từ -10 Vôn ÷10 Vôn. Với dạng tín hiệu này thì điện áp trục là rất nhỏ (mV) do đó chúng ta cần chọn module đầu vào có độ phân dải cao (16 bít trở lên) hoặc dùng bộ khếch đại tín hiệu từ 0 ÷ 1 Vôn lên 0 ÷ 10 Vôn. PLC của nhiều hãng có chức năng xử lí và các module tương tự đáp ứng được yêu cầu này. Tuy nhiên, lựa chọn module có độ phân giải 24 bít NI9207 [6] hoặc (NI9239) kết hợp với module thu thập dữ liệu NI cDAQ – 9171 của hãng National Instruments là phù hợp nhất cho áp dụng này. LabVIEW lập trình bằng ngôn ngữ đồ họa (Graphical language) giúp việc lập trình nhanh chóng và tạo ra giao diện đẹp, dễ sử dụng cho người vận hành. Hình 2.1 thể hiện cách thu thập và cách đấu nối tín hiệu đầu vào khi sử thiết bị của hãng National Instruments.

a) Thu thập tín hiệu thiết bị đo b) Sơ đồ đấu nối tín hiệu
Hình 2.1: Phần cứng và cách đấu nối tín hiệu của thiết bị đo
Tiếp đến cần lập trình cho hệ thống. Việc lập trình là hết sức đơn giản khi ta thu thập tín hiệu đầu vào sau đó tính trung bình cộng khoảng 5 giá trị. Thông qua công thức chuyển đổi sang giá trị thật rồi cho hiển thị phục vụ việc giám sát thông số. Ngoài ra các dự liệu này còn được lưu giữ dưới dạng file Excel giúp cho tính toán, lưu giữ giám sát một cách dẽ dàng. Thuật toán của hệ thống được thể hiện trên Hình 2.2.
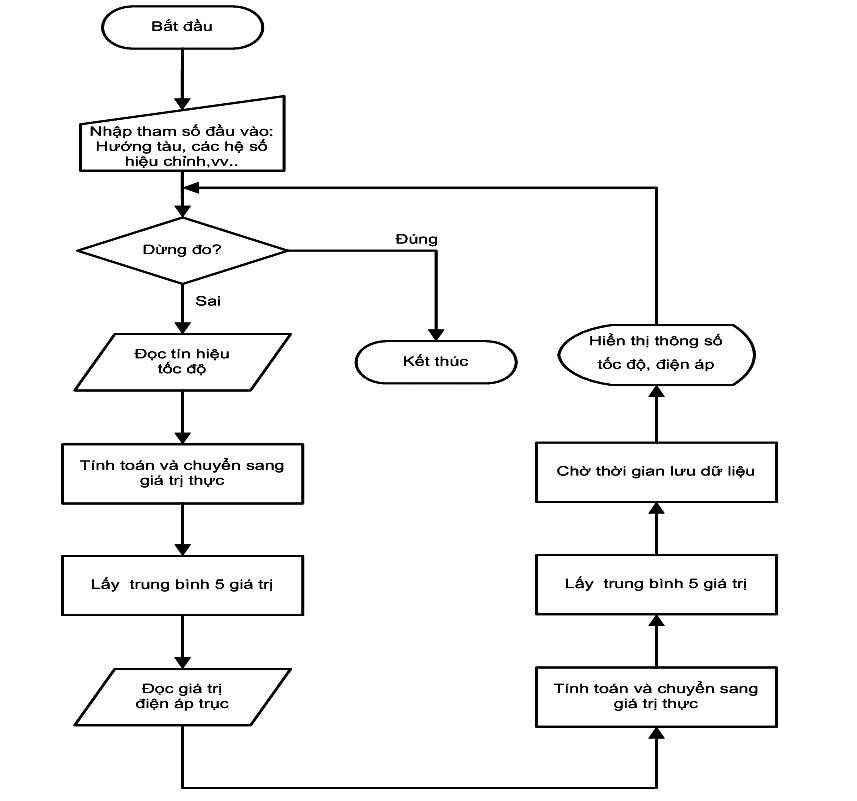
Hình 2.2: Thuật toán cho hệ thống
Hình 2.3 thể hiện giao diện màn hình giám sát được lập trình trên Front panel của LabVIEW có các thông số sau: Thời gian đọc và lưu giữ tín hiệu đầu vào (Second to save data), hiệu chỉnh thông số cho tín hiệu điện áp trục (Emf adjust) và vòng quay (Rpm adjust). Ngoài ra còn có thông số liên quan đến vị trị và hướng đi của tàu, các giá trị này người sử dụng nhập bằng tay. Với giao diện trên người sử dụng có thể dễ dàng quan sát giá trị hiện tại cũng như giá trị được ghi lại thông qua các đồ thị thời gian thực.
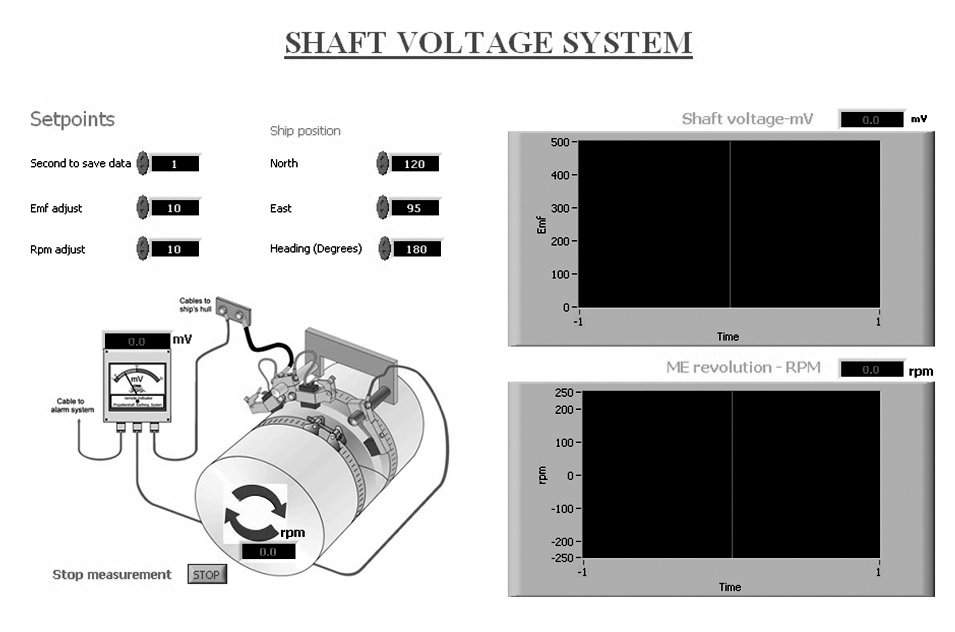
Hình 2.3: Màn hình giám sát của thiết bị đo
3. Kết quả đo đạc thực nghiệm
3.1. Mô hình thực nghiệm
Dùng thiết bị trên xuống tàu để đo giá trị điện áp và sự phụ thuộc của nó theo vòng tua chân vịt và hướng của tàu. Thông số của tàu thực nghiệm được thể hiện trên Bảng 3.1.
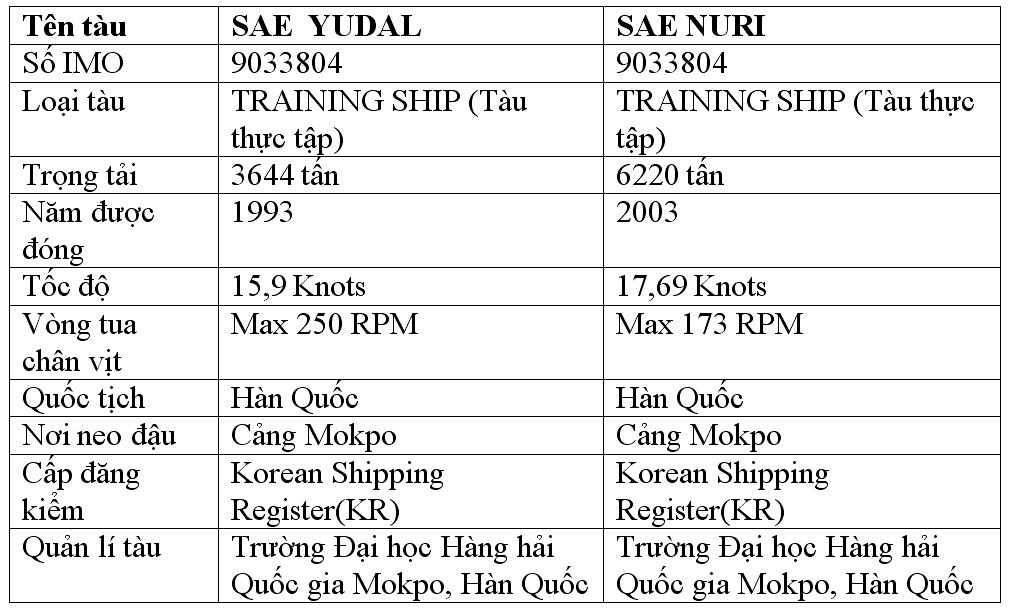
Bảng 3.1. Thông số của tàu dùng trong quá trình đo thực nghiệm
3.2. Kết quả thực nghiệm
3.2.1. Sự phụ thuộc của điện áp theo tốc độ vòng quay
Trước khi đo ta cần lưu ý là hệ thống này có liên quan mật thiết tới hệ thống chống ăn mòn điện hóa trên tàu ICCP (Impressed Current Cathodic Protection) nên trong quá trình đo đạc ta cần ngắt nguồn cho hệ ICCP [1].
Kết quả khi tiến hành đo điện áp trục tại hai tàu trên được chỉ ra tại Hình 3.1. Căn cứ vào kết quả đo được ta nhận thấy kết quả sau:
- Điện áp trục phụ thuộc tỷ lệ thuận với tốc độ vòng tua chân vịt ở giá trị vòng tua thấp, tuy nhiên sự phụ thuộc này là không đối xứng. Cụ thể là khi chân vịt đảo chiều thì giá trị điện áp đo được là nhỏ hơn. Ví dụ, tại vòng tua 100 theo chiều tiến điện áp trục nhận được trên tàu SEA YUDAL là 285mV, tàu SAE NURI là 403mV nhưng cũng vòng tua 100 theo chiều lùi thì điện áp trục nhận được trên tàu SEA YUDAL chỉ là 190 – 200mV, tàu SAE NURI là 300mV. Kết quả tương tự khi tại các giá trị vòng tua khác;
- Khi vòng tua tăng lên giá trị điện áp này lại có xu hướng giảm theo cả hướng tiến cũng như hướng lùi. Có nhiều nguyên nhân gây ra hiện tượng này; tuy nhiên, nguyên nhân chính là do với vòng tua cao sự tiếp xúc giữa trục chân vịt và các bệ đỡ, các cơ cấu khác tốt hơn nên nó đã tự triệt tiêu. Ngoài ra, còn do tính chất động lực học của chân vịt và một số nguyên nhân khác cần làm rõ.
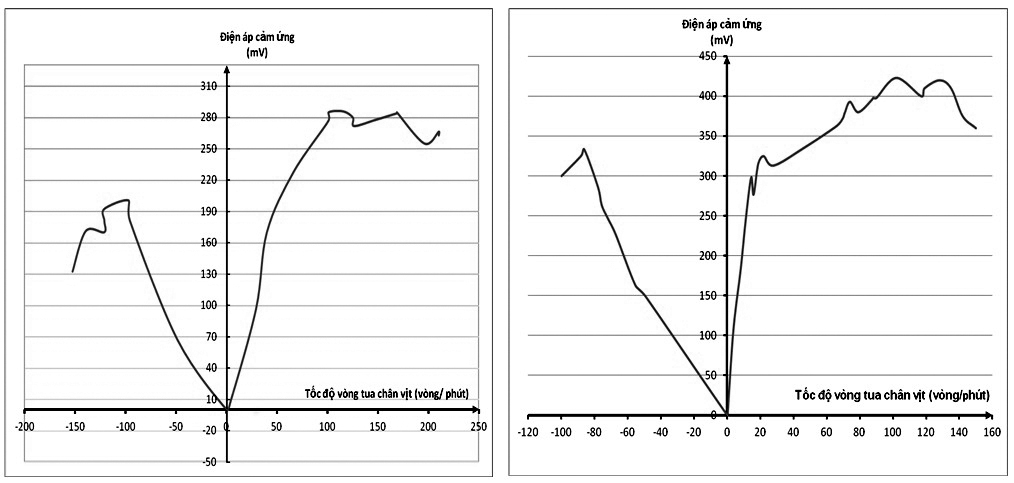
a) Đặc tính của tàu SAE YUDAL b) Đặc tính của tàu SAE NURI
Hình 3.1: Mối quan hệ giữa điện áp trục theo tốc độ vòng tua máy chính
4. Kết luận
Bài báo đã đề cập đến hiện tượng điện áp trục chân vịt tàu thủy và các tác hại, hệ lụy của nó gây ra trong quá trình khai thác vận hành tàu. Bài báo cũng đề cập đến việc chế tạo thiết bị đo và giám sát các thông số khi ứng dụng phần mềm LabVIEW. Sau đó sử dụng thiết bị này để đo điện áp trục chân vịt trên hai tàu thực tập SAE YUDAL và SAE NURI để lấy thông số phân tích. Các kết quả phân tích sẽ được tác giả trình bày chi tiết ở bài báo tiếp theo.
Tài liệu tham khảo
[1].http://www.cathelco.com/shaft-earthing-systems-_108_2_65.html.
[2].http://www.altheris.com/propeller-shaft-earthing-overview.htm.
[3]. Gary Johnson, Richard Jennings (2006), LabVIEW Graphical Programming, McGraw – Hill.
[4]. Ian Fairweather, Anne Brumfield (2011), A Developer’s Guide to Real World Integration, CRC Press.
[5]. Silviu Folea (2011), Practical Applications and Solutions Using LabVIEW Software, InTech Press.
[6]. http://www.ni.com/pdf/manuals/375206a.pdf
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.