Liên hệ quảng cáo
Xây dựng bộ điều khiển chuyển động tàu thủy bám quỹ đạo dựa trên thuật toán điều khiển Receding Horizon tối ưu lqr khi có hạn chế tín hiệu điều khiển
Bài báo đề cập đến vấn đề xây dựng bộ điều khiển bám quỹ đạo đặt cho đối tượng phi tuyến (tàu thủy với mô hình toán 3 bậc tự do thiếu cơ cấu chấp hành (3 DOF) trên mặt phẳng ngang) có quán tính lớn.
TS. NGUYỄN HỮU QUYỀN; ThS. PHAN ĐĂNG ĐÀO; ThS. NGUYỄN THANH VÂN
Trường Đại học Hàng hải Việt Nam
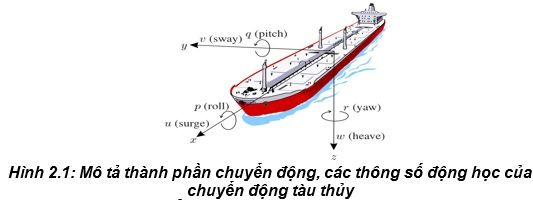 |
TÓM TẮT: Bài báo đề cập đến vấn đề xây dựng bộ điều khiển bám quỹ đạo đặt cho đối tượng phi tuyến (tàu thủy với mô hình toán 3 bậc tự do thiếu cơ cấu chấp hành (3 DOF) trên mặt phẳng ngang) có quán tính lớn. Bằng cách sử dụng bộ điều khiển tối ưu tuyến tính LQR (Linear Quadratic Regulator) thông qua việc tuyến tính hóa từng đoạn mô hình phi tuyến dọc theo trục thời gian khi tín hiệu điều khiển lái bị hạn chế.
TỪ KHÓA: Điều khiển tối ưu RHC (Receding Horizon Control) trên nền LQR, tuyến tính hóa từng đoạn mô hình dọc theo trục thời gian, ràng buộc tín hiệu điều khiển.
ABSTRACT: The article refers tothe problem of building trajectory controller for nonlinear object (the three degrees of freedom (3 DOF) underactuated ship mathermatic model on horizontal plane) with large inertia. By use the LQR linear optimal controller through the linearization each model segment along the time axis for Non-linear with input constraints.
KEYWORDS: Optimal Receding Horizon Control with LQR, linearization each model segmentalong the time axis, input Constraints.
Nội dung xem tại đây
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.