Liên hệ quảng cáo
Điều khiển AUV di chuyển bám theo địa hình đáy dùng mạng nơ-ron nhân tạo
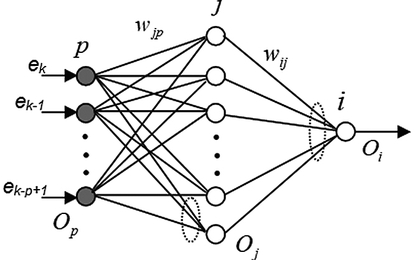
Bài báo nghiên cứu đề xuất bộ điều khiển nơ-ron làm nhiệm vụ điều khiển AUV bám theo địa hình đáy biển với khoảng cách đến đáy không thay đổi. Bộ điều khiển sử dụng mạng nơ-ron nhân tạo thích nghi cập nhật các trọng số của mạng trực tuyến trong quá trình điều khiển. Kết quả được mô phỏng và kiểm chứng trên máy tính với tác động của mô hình dòng chảy.
Diễn đàn khoa học



