Liên hệ quảng cáo
Điều khiển AUV di chuyển bám theo địa hình đáy dùng mạng nơ-ron nhân tạo
Bài báo nghiên cứu đề xuất bộ điều khiển nơ-ron làm nhiệm vụ điều khiển AUV bám theo địa hình đáy biển với khoảng cách đến đáy không thay đổi. Bộ điều khiển sử dụng mạng nơ-ron nhân tạo thích nghi cập nhật các trọng số của mạng trực tuyến trong quá trình điều khiển. Kết quả được mô phỏng và kiểm chứng trên máy tính với tác động của mô hình dòng chảy.
Tác giả: ThS. NCS. PHẠM VIỆT ANH
Trường Đại học Giao thông vận tải TP. Hồ Chí Minh
PGS. TS. NGUYỄN PHÙNG HƯNG
TS. LÊ VĂN TY
Trường Đại học Giao thông vận tải TP. Hồ Chí Minh
 |
|
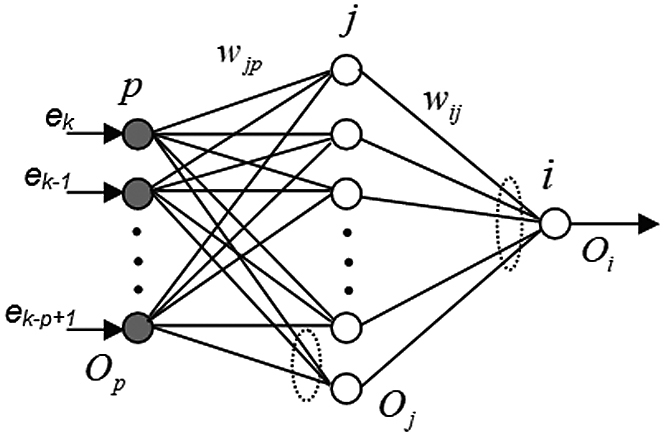
Sơ đồ mạng nơ-ron điều khiển |
Từ những năm 1990 đến nay, lý thuyết và những ứng dụng của mạng nơ-ron nhân tạo trong tự động điều khiển các phương tiện thủy đã được nhiều tác giả trình bày [1] và đạt được nhiều tiến bộ về cả lý thuyết và ứng dụng thực tiễn. Năm 2009, nhóm tác giả trong [2,3] đã giới thiệu thuật toán mạng nơ-ron nhân tạo điều khiển hướng đi và độ sâu cho phương tiện ngầm tự hành (AUV). B. Borvic (2001) và cộng sự nghiên cứu về điều khiển AUV sử dụng mạng nơ-ron nhân tạo [4]. Trong đó, bộ điều khiển xử lý nhiệm vụ điều khiển chính xác chuyển động của AUV tính đến tính năng động học của hệ động lực, dòng chảy. Bộ điều khiển sử dụng kết hợp thuật toán truyền thống và mạng nơ-ron nhân tạo thích nghi. J.H. Li và cộng sự (2002) trình bày nghiên cứu điều khiển chuyển động của AUV với bộ điều khiển nơ-ron thích nghi [5].
Năm 2017, B. Geranmehr và K. Vafaee trình bày nghiên cứu về bộ điều khiển nơ-ron thích nghi lai dạng trượt với thành phần tham số bền vững cho AUV [6]. Nghiên cứu này sử dụng điều khiển phi tuyến có khả năng loại bỏ nhiễu loạn thông qua kỹ thuật ước lượng thông minh các đặc tính không chắc chắn của AUV và môi trường. Tác giả sử dụng mạng nơ-ron Radial Basic Function để ước lượng các thành phần không chắc chắn và chưa xác định của đặc tính động học.
Cũng vào năm 2017, R. Cui và cộng sự trình bày nghiên cứu về điều khiển AUV bằng mạng nơ-ron thích nghi với đầu vào điều khiển phi tuyến sử dụng thuật toán học tăng cường [7]. Bài báo này trình bày điều khiển AUV theo quỹ đạo trong mặt phẳng ngang tính đến ảnh hưởng của ngoại cảnh, tính phi tuyến của tín hiệu vào và của mô hình AUV. Bộ điều khiển nơ-ron thích nghi sử dụng 2 mạng nơ-ron critic và action để đánh giá chất lượng bộ điều khiển vào thời điểm hiện tại và để bù thành phần động học không xác định. Phần tử bù được các tác giả thêm vào để loại bỏ các yếu tố phi tuyến của tín hiệu vào điều khiển. Bộ điều khiển nơ-ron thích nghi này được kiểm chứng đánh giá bằng mô phỏng.
Năm 2018, Jiemei Zhao trình bày nghiên cứu về điều khiển dự đoán sử dụng mạng nơ-ron cho AUV với kỹ thuật trễ tín hiệu đầu vào [8]. Trong đó, bộ điều khiển thực hiện nhiệm vụ điều khiển AUV bám theo đường đi. Để bù độ trễ trong hệ thống điều khiển và thực hiện yêu cầu bám theo đường đi xác định, tác giả đề xuất thuật toán điều khiển dự đoán. Một mạng nơ-ron được sử dụng để ước lượng thành phần phi tuyến không chắc chắn trong tính năng động học của AUV và do sự tương tác của các thành phần góc hướng, góc chúi và góc nghiêng AUV. Tính ổn định được đảm bảo bằng nguyên lý Lyapunov. Tác giả cũng mô phỏng kiểm chứng thuật toán đã đề xuất. Năm 2019, U. Ansari và A.H. Bajodah nghiên cứu về điều khiển AUV với thuật toán nơ-ron thích nghi và động học nghịch đảo [9].
Tuy nhiên, những nghiên cứu ứng dụng ở lĩnh vực này cho tự động điều khiển AUV ở Việt Nam còn và chưa phổ biến và xuất hiện nhiều. Năm 2017, nhóm tác giả trong [10] trình bày điều khiển tách rời hướng đi và độ sâu cho AUV với mạng nơ-ron nhân tạo thích nghi tương tác. Trong bài báo này, tác giả trình bày điều khiển AUV bám theo độ sâu trong quá trình làm việc. Bộ điều khiển (BĐK) bằng mạng nơ-ron nhân tạo được thiết kế cho nhiệm vụ này. Các thí nghiệm mô phỏng được tiến hành trên máy tính để kiểm tra, đánh giá hoạt động của BĐK.
Mời độc giả xem nội dung đầy đủ bài khoa học tại đây
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.