Liên hệ quảng cáo
Xây dựng và mô phỏng phương trình động lực học rô bốt Exoskeleton
Ngày nay, số người thiểu năng vận động ngày càng tăng do tai nạn, đột quỵ và tuổi già.
|
TS. Phạm Hoàng Vương Trường Đại học Giao thông vận tải TS. Chun-Ta Chen Taiwan Normal University Người phản biện: TS. Nguyễn Trường Giang TS. Nguyễn Đình Tứ |
TÓM TẮT: Ngày nay, số người thiểu năng vận động ngày càng tăng do tai nạn, đột quỵ và tuổi già. Hơn nữa, các tổn thất chức năng là kết quả của sự vận động, tai nạn nghề nghiệp, chấn thương cột sống và đột quỵ cần được phục hồi. Do đó, trong nghiên cứu này, một rô bốt trợ giúp phục hồi chức năng các chi trên được phát triển.
TỪ KHÓA: Động lực học, rô bốt trợ giúp, rô bốt phục hồi chức năng, mô phỏng matlab.
Abstract: Because of accidence, stroke and the aged, the number of immobile persons has lately been increasing. Moreover, the functional losses, which are resulted from the movement injury, occupation injury, spinal injury and stroke, may need the rehabilitation. Therefore, in this research project an upper-limbed exoskeleton robot driven by artificial muscles will be developed, and the passivity-based robust controller will be designed for the trackinog of a rehabilitation trajectory.
Keywords: Kinetics, exoskeleton robot, equations of motion, simulating with matlab.
1. ĐẶT VẤN ĐỀ
Rô bốt Exoskeleton được hiểu là một thiết bị được mang trên người và trợ giúp một số chức năng vận động của người đó. Hiện nay, đã có một số nghiên cứu về loại rô bốt này [1], [2], [3], [4], [5]. Tùy theo kết cấu và phương thức hoạt động của rô bốt mà chúng có các tên gọi như: Rô bốt sinh học (bio-robot), rô bốt người (humanoid robot), rô bốt bộ xương ngoài (exoskeleton), rô bốt mặc (wearable robot)... [3]. Trong bài báo, tác giả giới thiệu rô bốt có tên gọi là Exoskeleton như trên Hình 1.1. Rô bốt này có chức năng giúp phục hồi hoạt động của chi trên ở những người thiểu năng hoạt động các chi này. Nó có cấu tạo gồm phần cẳng tay được nối với phần cánh tay thông qua 1 khớp quay đại diện cho khớp khuỷu tay. Phần cánh tay hoạt động được nhờ 3 khớp quay được liên kết với nhau để tạo thành khớp vai như trên Hình 1.1.
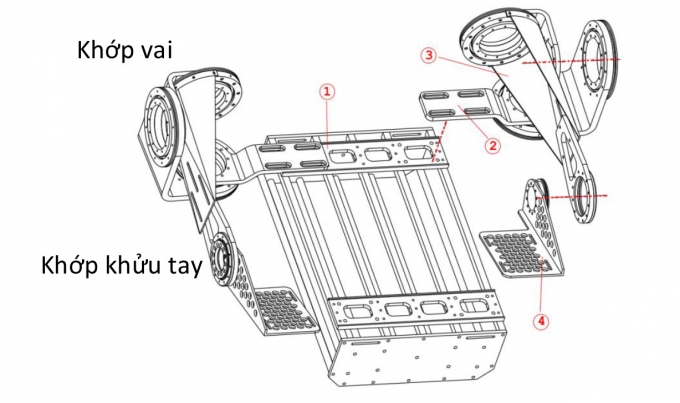 |
| Hình 1.1: Cấu tạo rô bốt Exoskeleton |
Hình 1.2 là một số hình ảnh thực tế về rô bốt Exoskeleton và quá trình mặc thử nghiệm tại phòng thì nghiệm. Phần 2 tác giả sẽ trình bày phương pháp xây dựng phương trình động lực học cho rô bốt Exoskeleton.
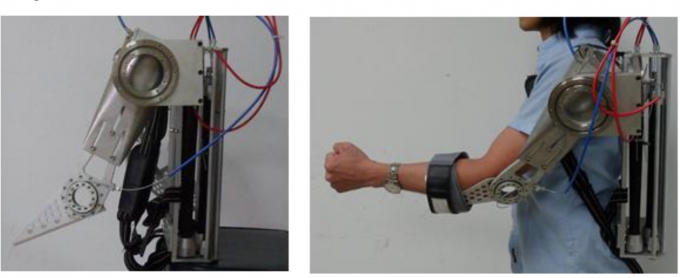 |
| Hình 1.2: Hình ảnh thực tế về rô bốt Exoskeleton |
2. NỘI DUNG
2.1. Phương trình động lực học rô bốt Exoskeleton
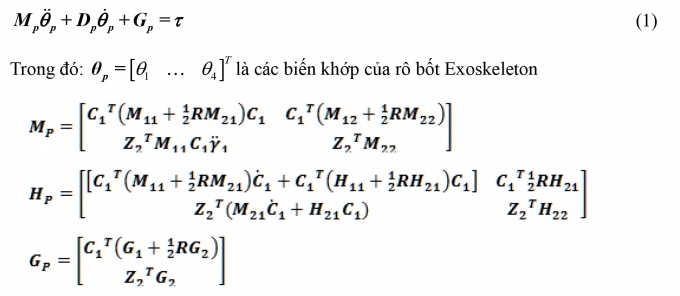
Để thành lập phương trình động lực học, trước tiên ta gắn các hệ trục lên rô bốt Exoskeleton như trên Hình 2.1. Phương trình động lực học viết cho rô bốt có dạng tổng quát như sau:
 |
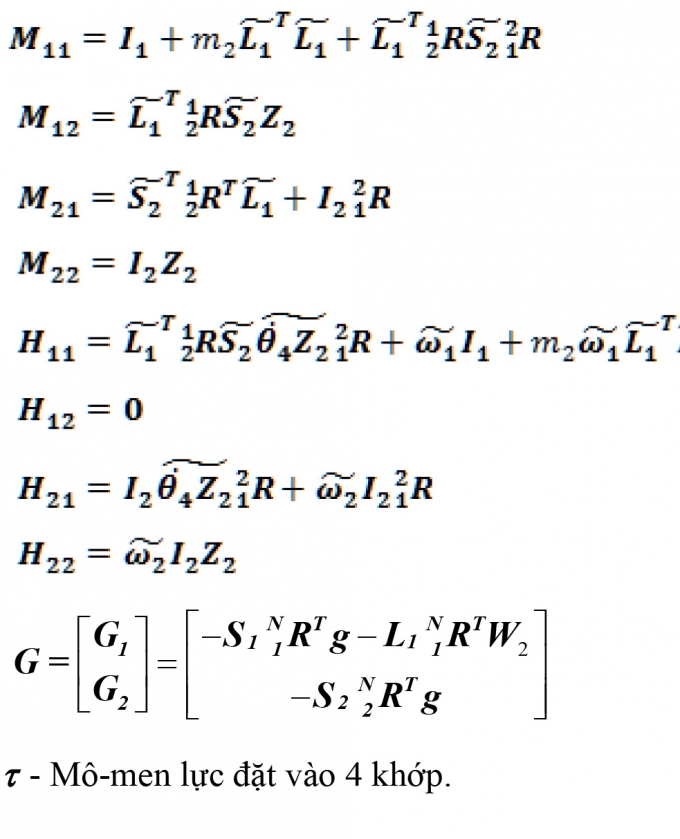 |
Các ma trận có trong các biểu thức trên được xác định như sau:
τ - Mô-men lực đặt vào 4 khớp.
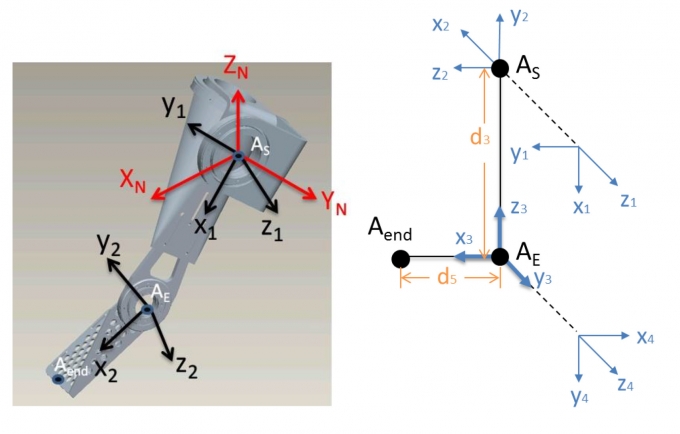 |
| Hình 2.1: Gắn các hệ tọa độ lên các khâu của rô bốt Exoskeleton |
2.2. Mô phỏng động lực học trên Matlab
Để mô phỏng ta chọn trước các thông số của rô bốt như sau:
Khối lượng của cẳng tay là 1kg và khối lượng của cánh tay 1kg, chiều dài của cẳng tay là 0,25m và chiều dài của cánh tay là 0,25m và một số thống số khác.
Tiến hành mô phỏng ta thu được kết quả như sau:
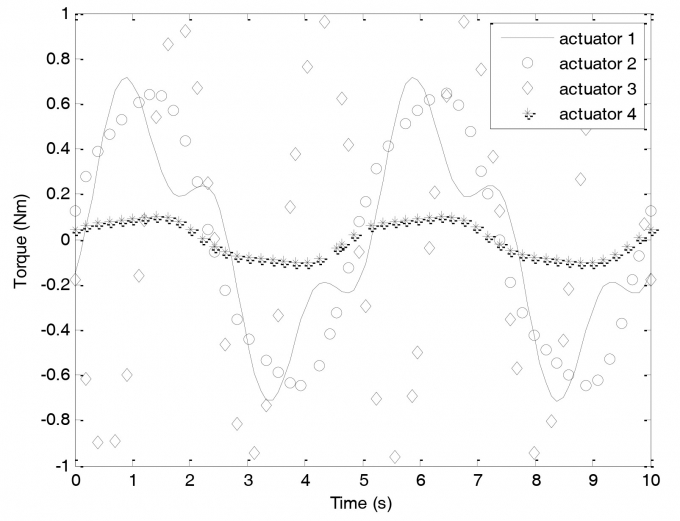 |
| Hình 2.2: Mô-men đặt lên các khớp của rô bốt Exoskeleton |
Hình 2.2 cho biết sự thay đổi của mô-men đặt lên các khớp theo thời gian khi cho điểm tác dụng cuối của Exoskeleton rô bốt di chuyển theo quỹ đạo là đường tròn cho trước và khi đó giá trị của các biến khớp thay đổi theo thơi gian như trên Hình 2.3.
 |
|
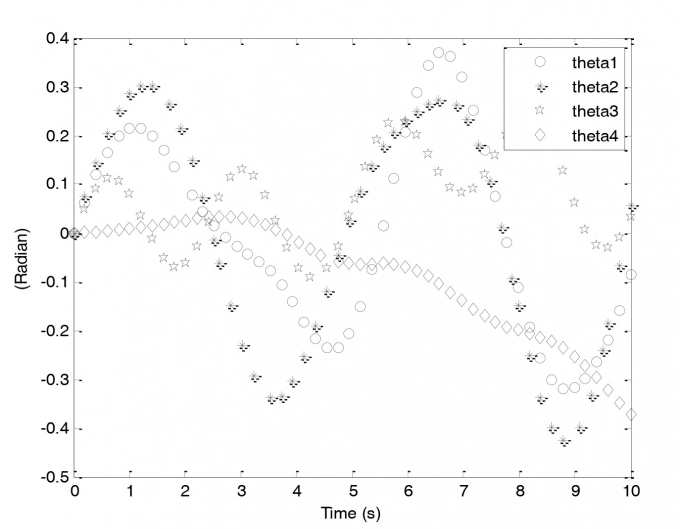
Hình 2.3: Sự thay đổi của các biến khớp theo thời gian |
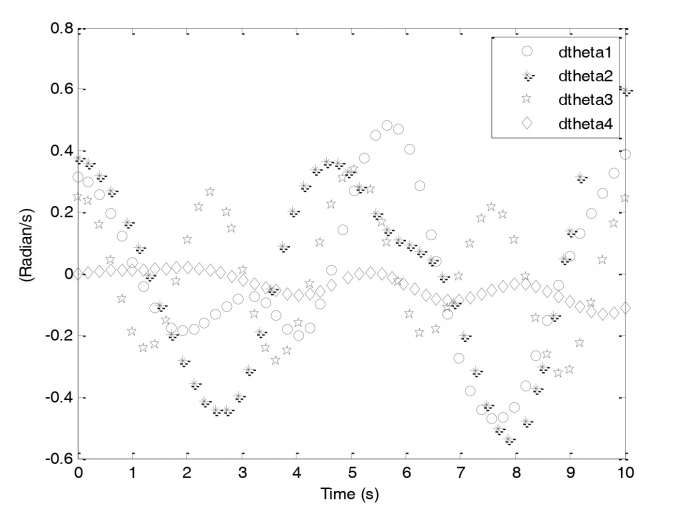
Ta thấy các biến khớp thay đổi theo dạng đồ thị hàm số cosin phù hợp với quỹ đạo di chuyển của điểm tác động cuối. Riêng biến khớp số 4 sự thay đổi không được thể thiện rõ trên đồ thị Hình 2.3 do sự thay đổi của biến khớp này là không đáng kể trong quá trình chuyển động. Hình 2.4 mô tả tốc độ thay đổi của các biến khớp trong quá trình chuyển động của rô bốt.
 |
|
Hình 2.4: Tốc độ thay đổi của các biến khớp |
3. KẾT LUẬN
Nghiên cứu đã giới thiệu một dạng ứng dụng mới của rô bốt vào trong đời sống, đặc biệt là giới thiệu rô bốt Exoskeleton hoàn toàn mới được thiết kế nhằm giúp phục hồi chức năng của chi trên. Các kết quả mô phỏng cho thấy quá trình hoạt động của rô bốt này hoàn toàn có thể ứng dụng được trên thực tế. Các nghiên cứu tiếp theo sẽ kết hợp với thử nghiệm và phân tích kết quả thực tế và lý thuyết.
Tài liệu tham khảo
[1]. Tăng Quốc Nam, Trần Anh Vàng (2013), Thiết kế cơ khí cho rô bốt hỗ trợ người thiểu năng vận động, Hội nghị toàn quốc lần thứ 2 về Điều khiển và Tự động hóa - VCCA 2013, p.290-296.
[2]. R. A. R. C. Gopura, Kazuo Kiguchi, D. S. V. Bandara (Aug 2011), A brief review on upper extremity robotic exoskeleton systems, International conference on industrial and information systems, Sri Lanka.
[3]. Jose L. Pons (2008), Wearable robots: Biomechatronic exoskeletons, John Wiley & Sons.
[4]. Jacob Rosen, Joel C. Perry (2007), Upper limb powered exoskeleton, International journal of humanoid robotics, Vol.4, No. 3, 529-548.
[5]. Masayuki Shimizu, Hiromu Kakuya, Woo-Keun Yoon, Kosei Kitagaki, Kazuhiro Kosuge (October 2008), Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution, IEEE transactions on robotics, Vol. 24, No 5.
[6]. http://www.mathworks.com.
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.