Liên hệ quảng cáo
Nghiên cứu xây dựng mô hình toán 6 bậc tự do và lập trình mô phỏng một số chuyển động cơ bản của phương tiện lặn ngầm phục vụ khảo sát và nghiên cứu biển
Lĩnh vực thiết kế, chế tạo, mô phỏng phục vụ thử nghiệm, đào tạo, huấn luyện vận hành phương tiện lặn ngầm cho các mục đích khảo sát và nghiên cứu biển ở Việt Nam đang được quan tâm và đầu tư nghiên cứu. Nội dung bài báo giới thiệu một số kết quả nghiên cứu như xây dựng mô hình toán chuyển động 6 bậc tự do, lựa chọn mô hình phương tiện lặn ngầm điển hình (NPS AUV II) để lập trình mô phỏng số cho một số chuyển động cơ bản sử dụng bánh lái tầm và bánh lái hướng như: chuyển động thẳng, chuyển động quay trở, lặn/nổi, lượn vòng (kết hợp lặn/nổi và quay trở). Kết quả nghiên cứu có ý nghĩa khoa học và thực tiễn trong giai đoạn tiếp cận công nghệ, có giá trị tham khảo tốt đối với các nghiên cứu hoàn thiện mô hình toán, ước tính và tối ưu hóa các hệ số thủy động lực học, kỹ thuật điều khiển, thử nghiệm vận hành... của phương tiện lặn ngầm không người lái AUV.
Tác giả: PGS. TS. TRẦN KHÁNH TOÀN; ThS. ĐOÀN THẾ MẠNH - Trường Đại học Hàng hải Việt Nam
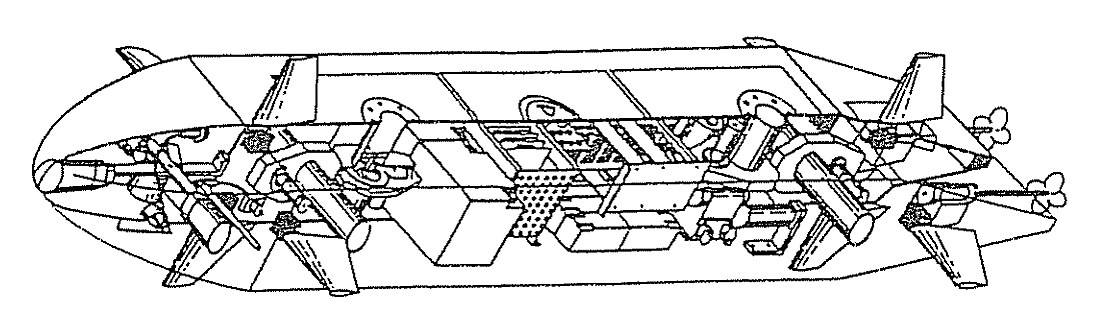 |
| Mô hình NPS AUV II |
Phương tiện khảo sát dưới nước không người lái UMV (Unmanned Maritime Vehicles) phục vụ khảo sát và nghiên cứu biển có nhiều loại, thường được phân thành 3 nhóm: Phương tiện lặn ngầm không người lái UUV (Unmanned Underwater Vehicle); Phương tiện mặt nước không người lái USV (Unmanned Surface Vehicle); Phương tiện lặn ngầm và mặt nước không người lái (tổ hợp cả USV và UUV). Trong đó, nhóm UUV được phân thành 2 lớp: (i) Lớp phương tiện điều khiển kết nối có dây với người điều khiển trên bờ, gồm Towed Vehicle, ROV (Remotely Operated Vehicle), SAUV (Semi-AUV); (ii) Lớp phương tiện điều khiển kết nối không dây với người điều khiển trên bờ (tự hành), gồm: Glider, AUV (Autonomous Underwater Vehicle).
Nghiên cứu về phương tiện lặn ngầm là lĩnh vực nghiên cứu còn mới và có ít nguồn tài liệu được chia sẻ ở Việt Nam, chỉ có một số ít cơ sở giáo dục đại học và viện nghiên cứu thực hiện với các thành quả nghiên cứu và chế tạo thử nghiệm ban đầu, như Trường Đại học Bách khoa TP. Hồ Chí Minh, Trường Đại học Nha Trang, Viện Khoa học Đo đạc và Bản đồ… Để hướng tới làm chủ công nghệ này, cần tiếp tục đầu tư nghiên cứu hoàn thiện về mô hình hình toán, ước tính và tối ưu hóa các hệ số thủy động lực học [1], thiết kế, chế tạo và thử nghiệm vận hành.
Trong nghiên cứu này, với mục tiêu tiếp cận nghiên cứu và xây dựng thử nghiệm mô hình toán và lập trình mô phỏng các chuyển động cơ bản của phương tiện lặn ngầm không người lái AUV điển hình, nhóm nghiên cứu đã lựa chọn mô hình mẫu NPS AUV II (Healey and Lienhard, 1993). Từ mô hình toán và chương trình lập trình mô phỏng số của mô hình này có thể xây dựng và phát triển cho các loại mô hình AUV tương đương khác.
Mời độc giả xem nội dung đầy đủ bài khoa học tại đây
Tag:





Bình luận
Thông báo
Bạn đã gửi thành công.